近三年3D点云顶会论文及源码合集,含2023最新
目前2D图像识别技术早已成熟,但2D的图像信息只有XY两个维度,而3D点云能够提供三维世界的信息,因此在自动驾驶、机器人和增强现实等各种领域都得到了广泛的应用。
近年来随着深度学习的发展,作为计算机视觉新兴研究热点的3D点云技术也在不断更新迭代,目前在数据获取、处理、分析和应用等方面仍然存在许多挑战。
我这次整理了近三年各大顶会中3D点云方向的论文,共61篇,有想法发paper的同学速看:
CVPR 2023
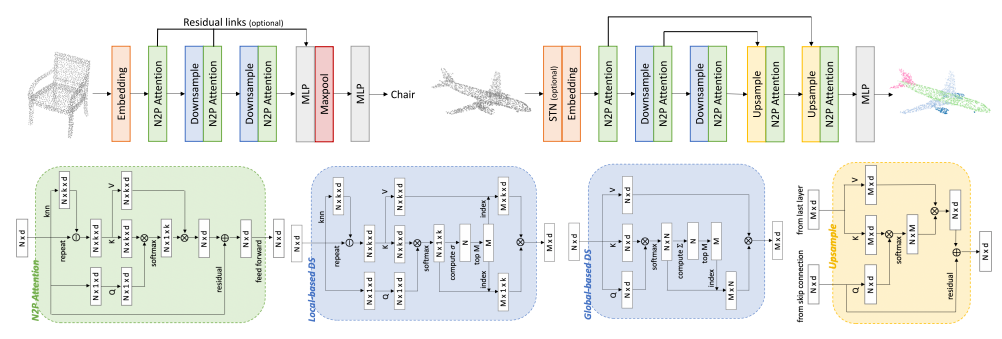
Attention-based Point Cloud Edge Sampling
一句话概括:本文提出一种非生成式基于注意力的点云边缘采样方法APES,通过提取点云轮廓上的显著点,在多个基准任务上表现出较好的性能。
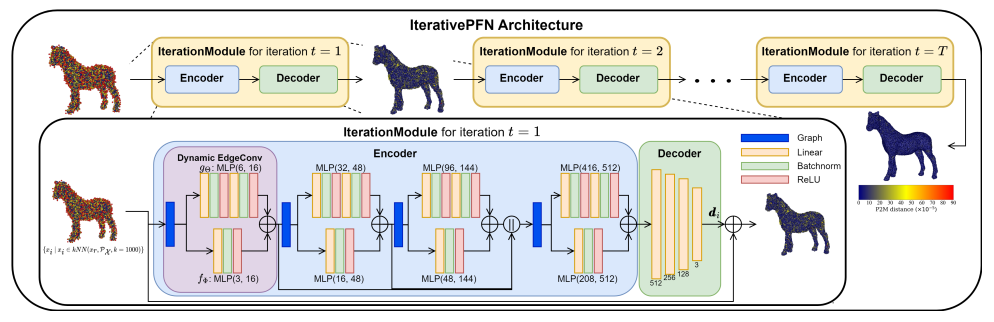
IterativePFN: True Iterative Point Cloud Filtering
一句话概括:本文提出了迭代点云过滤网络IterativePFN,它由多个IterationModule组成,在单个网络内部模拟真实的迭代过滤过程。作者使用新颖的损失函数训练该网络,该损失函数在每次迭代中使用自适应的真值目标,以捕捉训练期间中间过滤结果之间的关系。
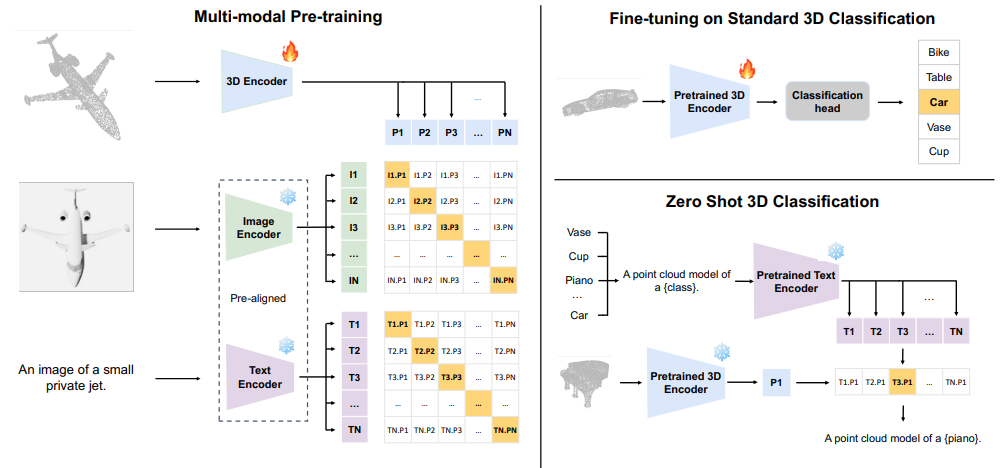
ULIP: Learning a Unified Representation of Language, Images, and Point Clouds for 3D Understanding
一句话概括:本文提出了ULIP,通过使用来自图像、文本和3D点云三种模态的对象组对进行预训练,学习统一的多模态表示。为克服训练三元组不足的问题,ULIP利用预训练的图像文本模型来获得共享的视觉语义空间,然后使用少量自动合成的三元组学习与之对齐的3D表示空间。
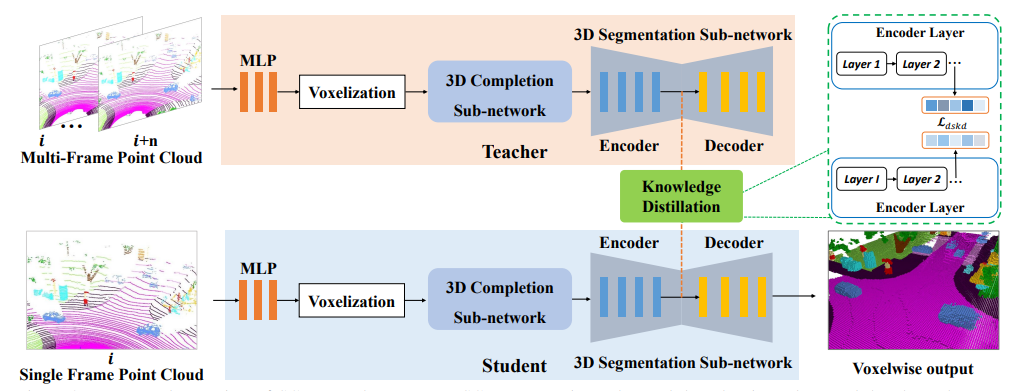
SCPNet: Semantic Scene Completion on Point Cloud
一句话概括:论文提出了三个方法来提高语义场景完成任务的性能:1)重新设计完成子网络,使用多路径模块聚合多尺度特征;2)设计师生知识蒸馏,将多帧模型的稠密语义知识迁移到单帧模型;3)使用泛光分割标签校正完成标签,去除动态物体。
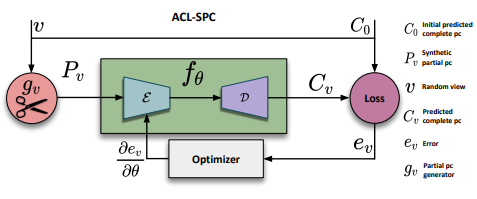
ACL-SPC: Adaptive Closed-Loop system for Self-Supervised Point Cloud Completion
一句话概括:该论文提出了一种自监督的点云补全框架ACL-SPC,可以在同域的数据上进行训练和测试,克服了现有监督方法需要合成数据以及域间差异的限制,使用自适应闭环系统强制网络输出对输入变化稳定,从而实现无需先验信息的点云自监督补全。
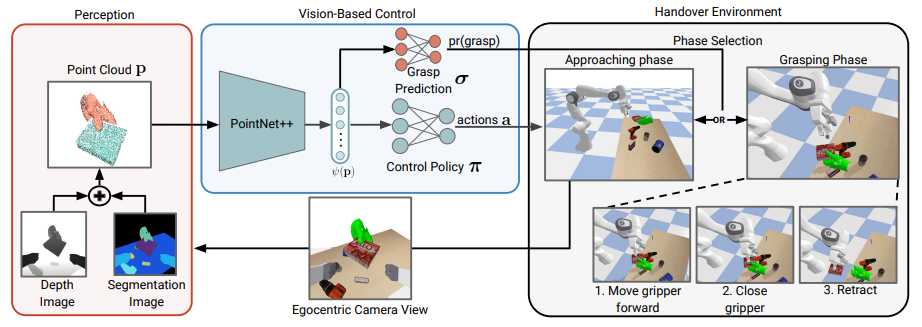
Learning Human-to-Robot Handovers from Point Clouds
一句话概括:论文提出了一个端到端的框架,用于学习基于视觉的人机交接控制策略,通过两阶段的教师-学生训练模式,使用运动规划、强化学习和自监督学习方法,实现了从模拟到真实的有效迁移。
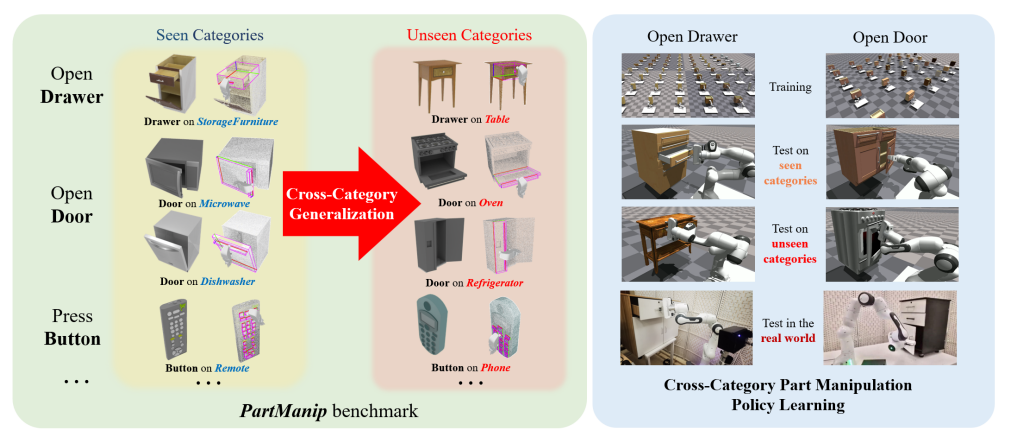
PartManip: Learning Cross-Category Generalizable Part Manipulation Policy from Point Cloud Observations
一句话概括:本文构建了第一个大规模基于部件的跨类别物体操作基准PartManip,包含11个类别494个物体1432个任务,相比现有工作更加复杂逼真,提出了基于部件规范化和部件感知奖励的专家示教方法以及基于对抗学习的学生学习方法,实现了基于稀疏点云的通用跨类别物体操作策略学习,在模拟和真实环境中都取得了 SOTA的性能。
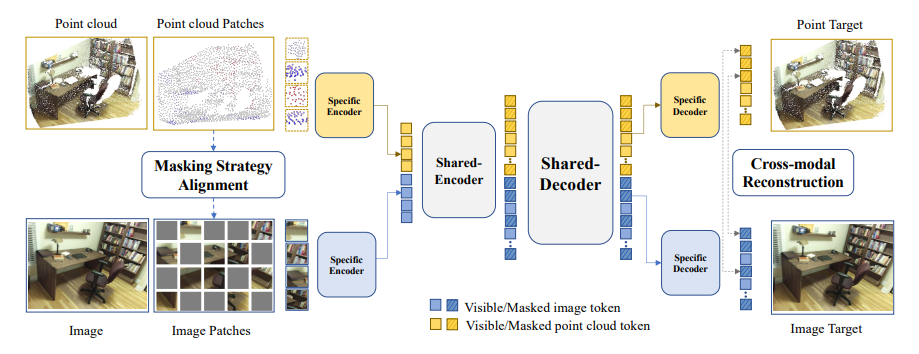
PiMAE: Point Cloud and Image Interactive Masked Autoencoders for 3D Object Detection
一句话概括:本文提出了PiMAE,这是一个跨模态的自监督预训练框架,通过三个方面提升了点云和图像这两种常见模态之间的交互:遮挡策略交互、共享解码器和跨模态重建模块,相比现有工作取得更好的点云和图像表示学习。
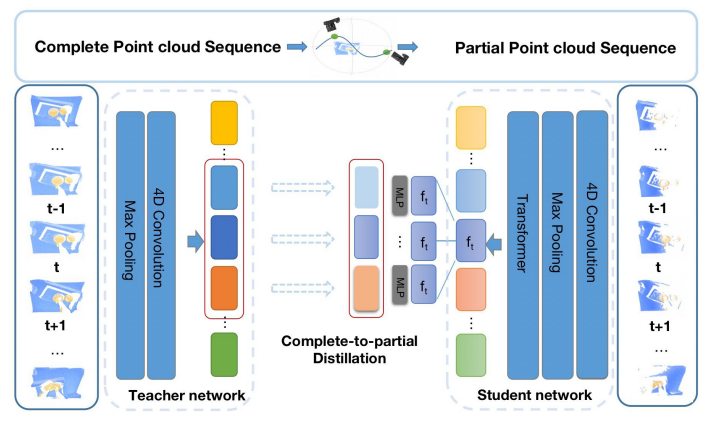
Complete-to-Partial 4D Distillation for Self-Supervised Point Cloud Sequence Representation Learning
一句话概括:本文提出了一种新的4D自监督预训练方法Complete-to-Partial 4D Distillation,关键思想是将4D自监督表示学习表述为一个teacher-student知识蒸馏框架,让student在teacher的指导下学习有用的4D表示,从而克服了现有方法仅考虑静态快照的局限,以及视频表示学习方法局限于图像空间流而不具3D几何意识的问题。
ICCV 2023
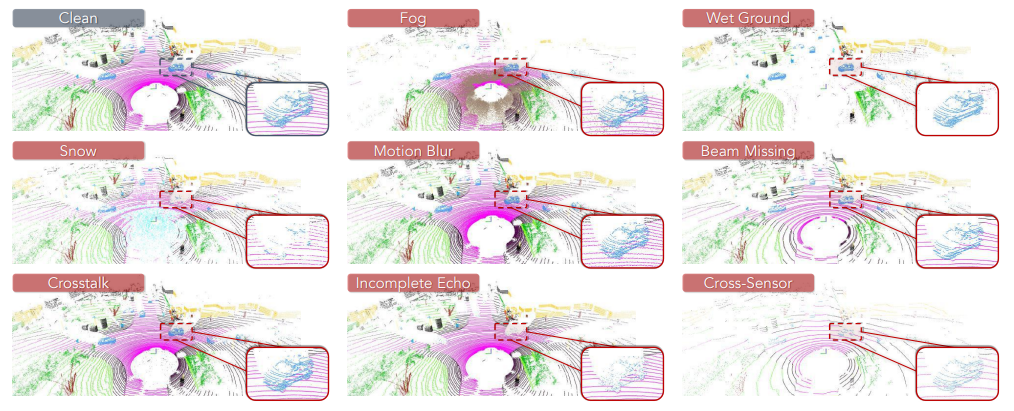
Robo3D: Towards Robust and Reliable 3D Perception against Corruptions
一句话概括:本文提出了第一个面向3D检测和分割模型鲁棒性的基准测试集Robo3D,包含来自恶劣天气、外部干扰和传感器故障的自然损坏,以探究这些模型在非理想场景下的可靠性。
CVPR 2022
-
Point-BERT: Pre-training 3D Point Cloud Transformers with Masked Point Modeling
-
A Unified Query-based Paradigm for Point Cloud Understanding
-
CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding
-
PointCLIP: Point Cloud Understanding by CLIP
-
Fast Point Transformer
-
RCP: Recurrent Closest Point for Scene Flow Estimation on 3D Point Clouds
-
The Devil is in the Pose: Ambiguity-free 3D Rotation-invariant Learning via Pose-aware Convolution
ECCV 2022
-
Open-world Semantic Segmentation for LIDAR Point Clouds
-
2DPASS: 2D Priors Assisted Semantic Segmentation on LiDAR Point Clouds
-
CPO: Change Robust Panorama to Point Cloud Localization
-
diffConv: Analyzing Irregular Point Clouds with an Irregular View
-
CATRE: Iterative Point Clouds Alignment for Category-level Object Pose Refinement
-
Dual Adaptive Transformations for Weakly Supervised Point Cloud Segmentation
-
SeedFormer: Patch Seeds based Point Cloud Completion with Upsample Transformer
-
Dynamic 3D Scene Analysis by Point Cloud Accumulation
-
3D Siamese Transformer Network for Single Object Tracking on Point Clouds
-
Salient Object Detection for Point Clouds
-
MonteBoxFinder: Detecting and Filtering Primitives to Fit a Noisy Point Cloud
-
Improving RGB-D Point Cloud Registration by Learning Multi-scale Local Linear Transformation
-
Learning to Generate Realistic LiDAR Point Clouds
CVPR 2021
-
Equivariant Point Network for 3D Point Cloud Analysis
-
PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
ICCV 2021
-
A Robust Loss for Point Cloud Registration
-
A Technical Survey and Evaluation of Traditional Point Cloud Clustering Methods for LiDAR Panoptic Segmentation
-
A Spoonful of Refinements Helps the Registration Error Go Down (Oral)
-
ABD-Net: Attention Based Decomposition Network for 3D Point Cloud Decomposition
-
AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds
-
Box-Aware Feature Enhancement for Single Object Tracking on Point Clouds
-
CPFN: Cascaded Primitive Fitting Networks for High-Resolution Point Clouds
-
Deep Models with Fusion Strategies for MVP Point Cloud Registration
-
DRINet: A Dual-Representation Iterative Learning Network for Point Cloud Segmentation
-
Guided Point Contrastive Learning for Semi-supervised Point Cloud Semantic Segmentation
-
Learning Inner-Group Relations on Point Clouds
-
InstanceRefer: Cooperative Holistic Understanding for Visual Grounding on Point Clouds through Instance Multi-level Contextual Referring
-
ME-PCN: Point Completion Conditioned on Mask Emptiness
-
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration
-
Out-of-Core Surface Reconstruction via Global TGV Minimization
-
PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds
-
PICCOLO: Point Cloud-Centric Omnidirectional Localization
-
Point Cloud Augmentation with Weighted Local Transformations
-
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers (Oral)
-
ReDAL: Region-based and Diversity-aware Active Learning for Point Cloud Semantic Segmentation
-
Sampling Network Guided Cross-Entropy Method for Unsupervised Point Cloud Registration
-
SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer
-
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds
-
Towards Efficient Point Cloud Graph Neural Networks Through Architectural Simplification
-
Unsupervised Learning of Fine Structure Generation for 3D Point Clouds by 2D Projection Matching
-
Unsupervised Point Cloud Pre-Training via View-Point Occlusion, Completion
-
Vis2Mesh: Efficient Mesh Reconstruction from Unstructured Point Clouds of Large Scenes with Learned Virtual View Visibility
-
Voxel-based Network for Shape Completion by Leveraging Edge Generation
-
Walk in the Cloud: Learning Curves for Point Clouds Shape Analysis
关注下方《学姐带你玩AI》???
回复“3D点云”获取论文+代码合集
码字不易,欢迎大家点赞评论收藏!