拍运算 信号中“拍”的概念 通信中“拍”的概念
我这有两个同方向但不同频率的谐振动
x
1
x_1
x1 和
x
2
x_2
x2,可以用旋转矢量
A
1
boldsymbol{A}_1
A1 和
A
2
boldsymbol{A}_2
A2 来表示,
x
1
x_1
x1 和
x
2
x_2
x2 就是旋转矢量在
x
x
x 轴上的投影,
x
1
=
A
1
cos
(
ω
1
t
+
φ
1
)
x
2
=
A
2
cos
(
ω
2
t
+
φ
2
)
x_1=A_1cos(omega_1t+varphi_1) \ x_2=A_2cos(omega_2t+varphi_2)
x1=A1cos(ω1t+φ1)x2=A2cos(ω2t+φ2)
A
1
boldsymbol{A}_1
A1 和
A
2
boldsymbol{A}_2
A2 的角速度不同,它们的合成矢量
A
boldsymbol{A}
A 不以恒定角速度旋转,这一点非常重要,这说明了他们的合成振动不再是谐振动。
A
boldsymbol{A}
A 沿
x
x
x 轴投影的振幅为,
A
=
A
1
2
+
A
2
2
+
2
A
1
A
2
cos
(
ω
2
−
ω
1
)
t
A=sqrt{A_1^2+A_2^2+2A_1A_2cos(omega_2-omega_1)t}
A=A12+A22+2A1A2cos(ω2−ω1)t
虽然它不是谐振动了,不再符合 A cos ( ω t + φ ) Acos(omega_t+varphi) Acos(ωt+φ) 的形式了,但它还是振动,只要是振动就有振幅的概念,并且振幅随时间周期性变化。
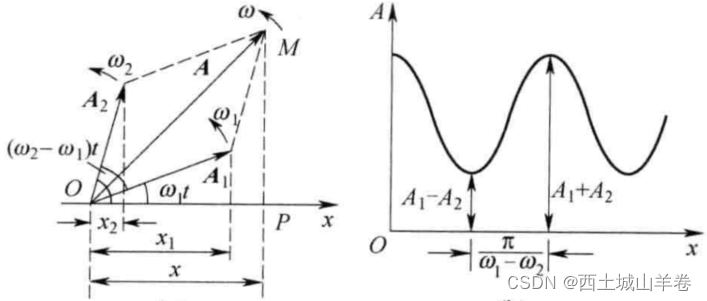
可以看出振幅在
A
=
A
1
+
A
2
A=A_1+A_2
A=A1+A2 和
A
=
∣
A
1
−
A
2
∣
A=|A_1-A_2|
A=∣A1−A2∣ 间周期性变化,振动频率为,
v
=
∣
ω
2
−
ω
1
∣
2
π
v=frac{|omega_2-omega_1|}{2pi}
v=2π∣ω2−ω1∣
这里说的振动的频率是振幅从一次极大到另一次极大的变化,并不是说它是一个角频率为 ∣ ω 2 − ω 1 ∣ |omega_2-omega_1| ∣ω2−ω1∣ 的谐振动。因为它并非匀速变化的。
当两个谐振动的频率相差很小时,就会出现“拍”的现象。我这里有两个初相为零,频率差很小,振幅相同的谐振动,
x
1
=
A
1
cos
ω
1
t
x
2
=
A
2
cos
ω
2
t
x
=
x
1
+
x
2
=
[
2
A
1
cos
1
2
(
ω
2
−
ω
1
)
t
]
cos
1
2
(
ω
2
+
ω
1
)
t
x_1=A_1cosomega_1t \ x_2=A_2cosomega_2t \ x=x_1+x_2=left[2A_1cosfrac{1}{2}(omega_2-omega_1)tright]cosfrac{1}{2}(omega_2+omega_1)t
x1=A1cosω1tx2=A2cosω2tx=x1+x2=[2A1cos21(ω2−ω1)t]cos21(ω2+ω1)t
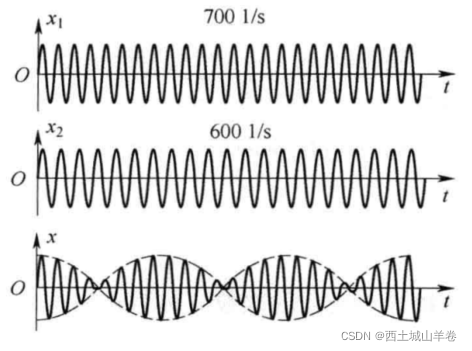
一定要明确,这里的合成信号已经不是一个谐振动了,它已经不再符合 A cos ( ω t + φ ) Acos(omega_t+varphi) Acos(ωt+φ) 的形式了,只不过 1 2 ( ω 2 + ω 1 ) frac{1}{2}(omega_2+omega_1) 21(ω2+ω1) 是合成信号变化周期的主要原因。将 [ 2 A 1 cos 1 2 ( ω 2 − ω 1 ) t ] left[2A_1cosfrac{1}{2}(omega_2-omega_1)tright] [2A1cos21(ω2−ω1)t] 部分视为合成信号的幅度,可以看出它是一个谐振动。所以我们能够感受到“拍”。
所谓“拍”,是从音乐的角度来讲的。两个频率相近的信号,我们认为音调几乎一样,他们两个的合成信号,音调提升一倍,但是能够明显的感受到音量的周期性涨落,这就是一“拍”。