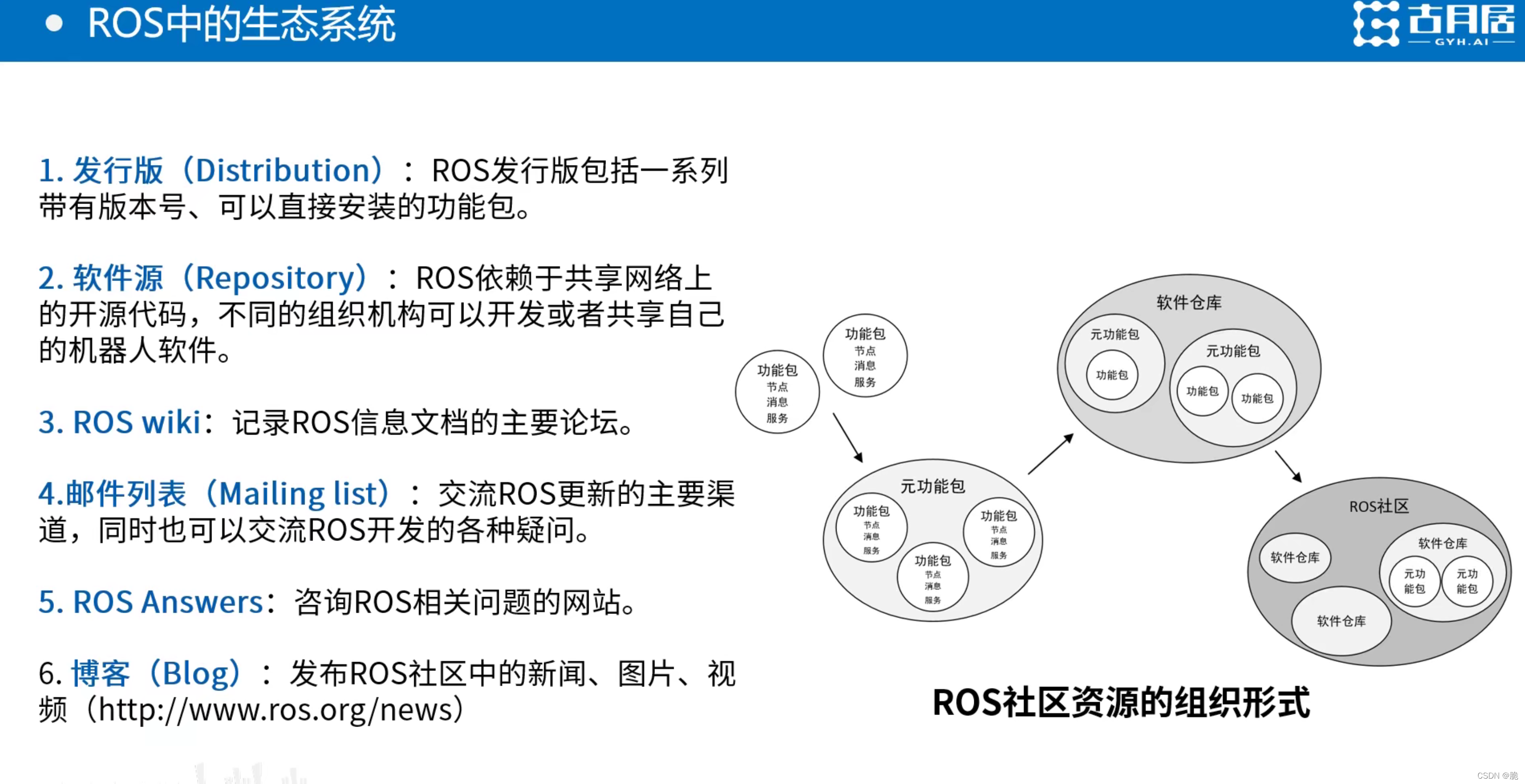
【古月居ROS21讲笔记】ROS是什么 ROS是什么 ros=通信机制+开发工具+应用功能+生态系统 *用于提升机器人研发中的软件复用率 通讯机制 松耦合分布式通信软件框架 基于一系列节点,所有的功能被抽象成节点,节点之间以箭头连接,表示通信(整个网络称为计算图) 节点是负责完成某个具体的功能的进程,节点之间有数据传输,节点之间可在不同的设备,用不同的语言开发,只要尊村统一的通讯机制就行 开发工具 命令行 可视化工具:QT、Rviz、TF(坐标变换)等 ROS中应用功能 以功能包的形式提供,具有封装好的输入输出接口 ROS生态系统