DYC算法开发与测试(基于ModelBase实现)
ModelBase是经纬恒润开发的车辆仿真软件,包含两个大版本:动力学版本、智能驾驶版本。动力学版包含高精度动力学模型,能很好地复现车辆在实际道路中运行的各种状态变化,可用于乘用车、商用车动力底盘系统算法开发、控制器仿真测试;智能驾驶版本在动力学版本的基础上增加了动静态场景仿真、各类传感器模型、高逼真动画渲染,可用于乘用车、商用车的整车电控系统、ADAS系统的设计、测试和验证。
直接横摆力矩控制
当汽车转向时道路条件恶劣或速度过快,汽车很可能出现“推头”、“甩尾”的现象,而直接横摆力矩控制(Direct Yaw Moment Control,DYC)可大幅提高车辆转向时的操纵稳定性。DYC是辅助驾驶中的常见方法,通过附加四轮转矩保持车辆行驶的稳定性,在极限工况下控制性能强悍,极大保证了车辆行驶的安全性。
线性二次型最优控制器(linear quadratic regulator, LQR)在自动驾驶中常用于控制车辆的横摆稳定性,本文将基于LQR算法设计直接横摆力矩控制器,并完成Modelbase与Matlab的联合仿真。
基于Modelbase与Simulink搭建DYC
Modelbase设置
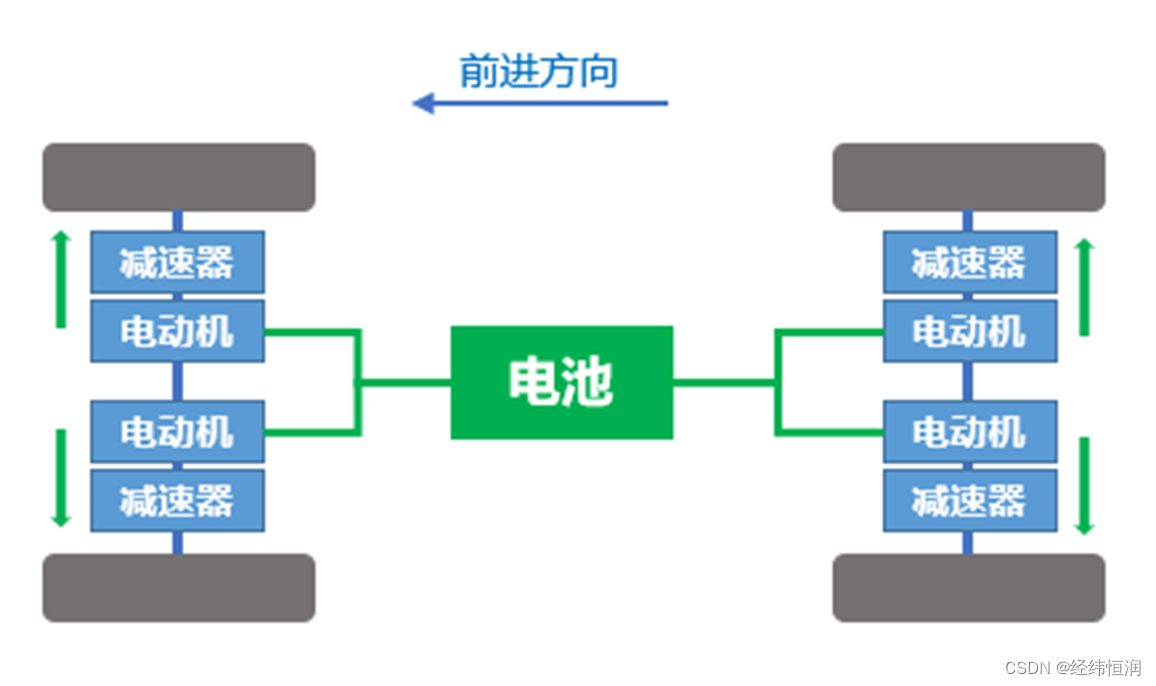
面对石油价格上涨、环境污染等问题,纯电动汽车的应用与普及已成为未来发展的趋势。分布式轮毂电机驱动作为新兴的驱动结构,具有四轮转矩独立可控、结构紧凑、智能网联适配性强等特点,大大提高了车辆稳定性控制的灵活性。在Modelbase车辆构型中,选择四驱四电机的纯电动汽车。
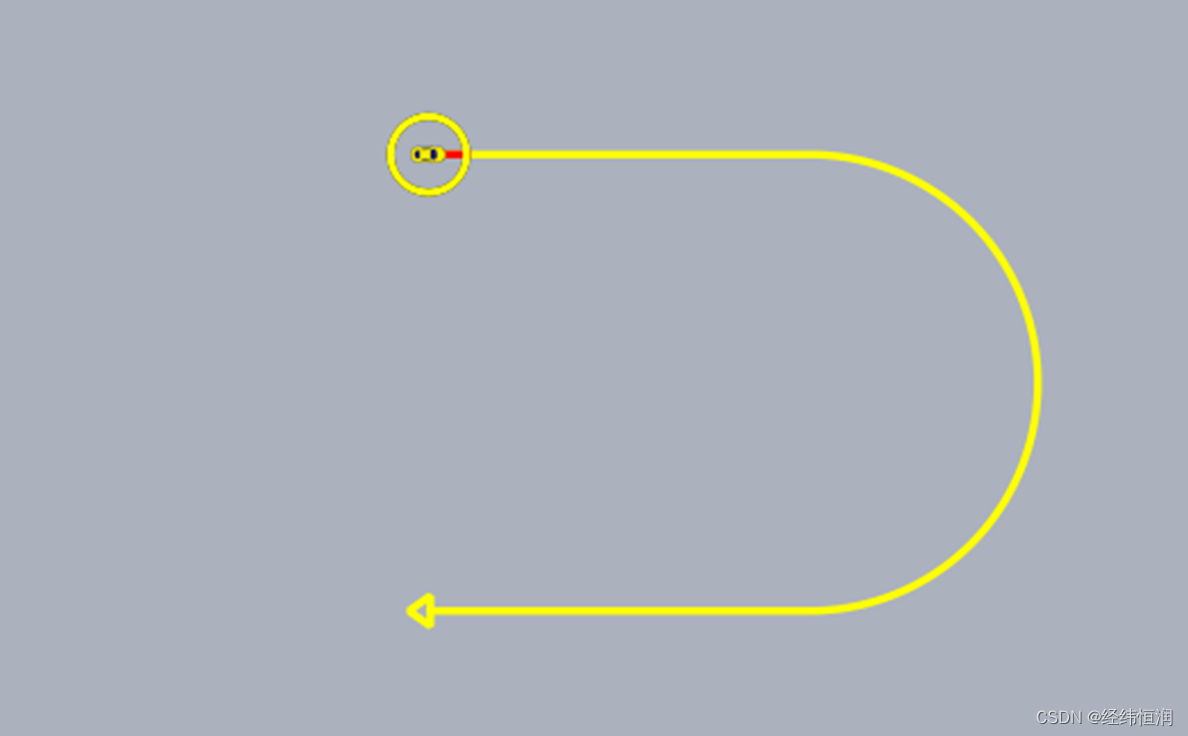
在ModelBase场景编辑器中,设置车辆如下图所示的轨迹行进,并设置初速度为60km/h。
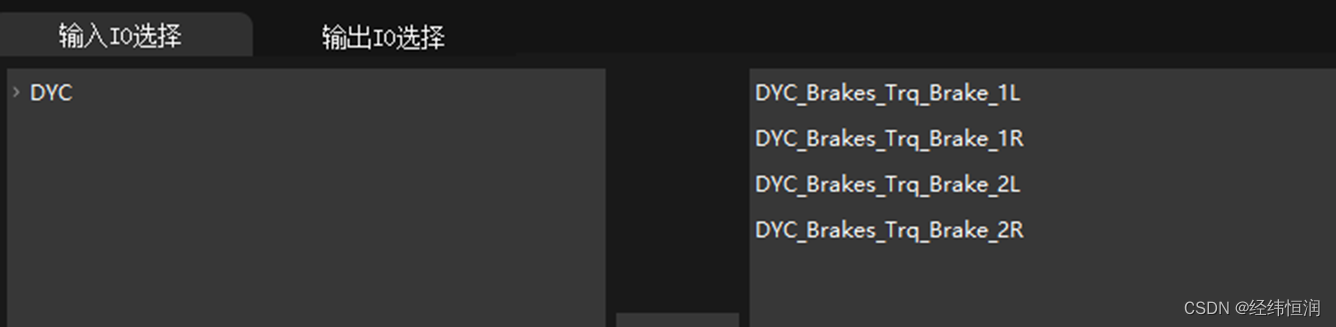
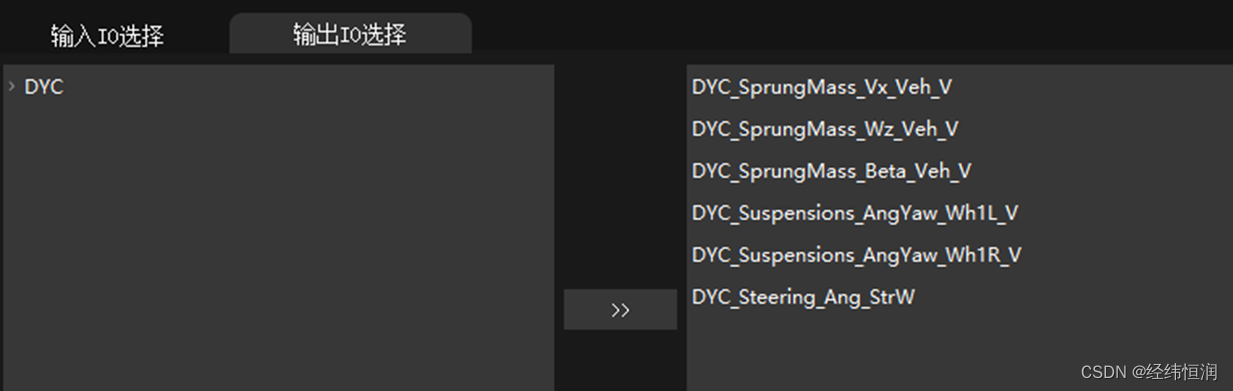
设置IO接口,车辆模型依次输出车体纵向加速度、横摆角速度、质心侧偏角、左/右前轮转角、方向盘转角 ,输入接口为四轮的制动力矩。
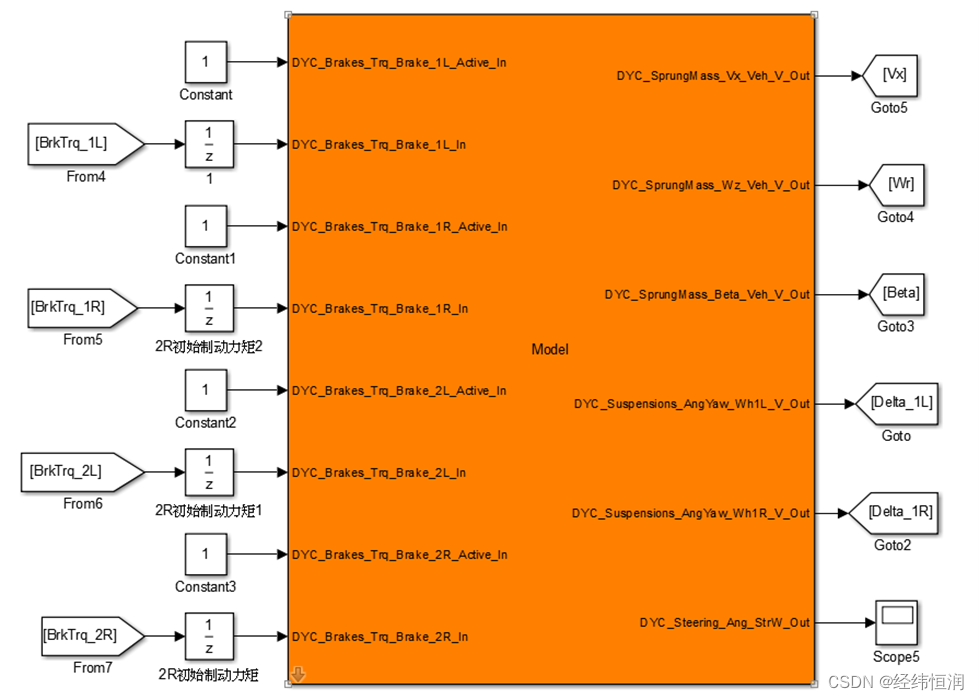
导入simulink后可自动生成modelbase模块,后续算法将应用在此基础上对纯电动汽车进行闭环控制。
LQR算法搭建
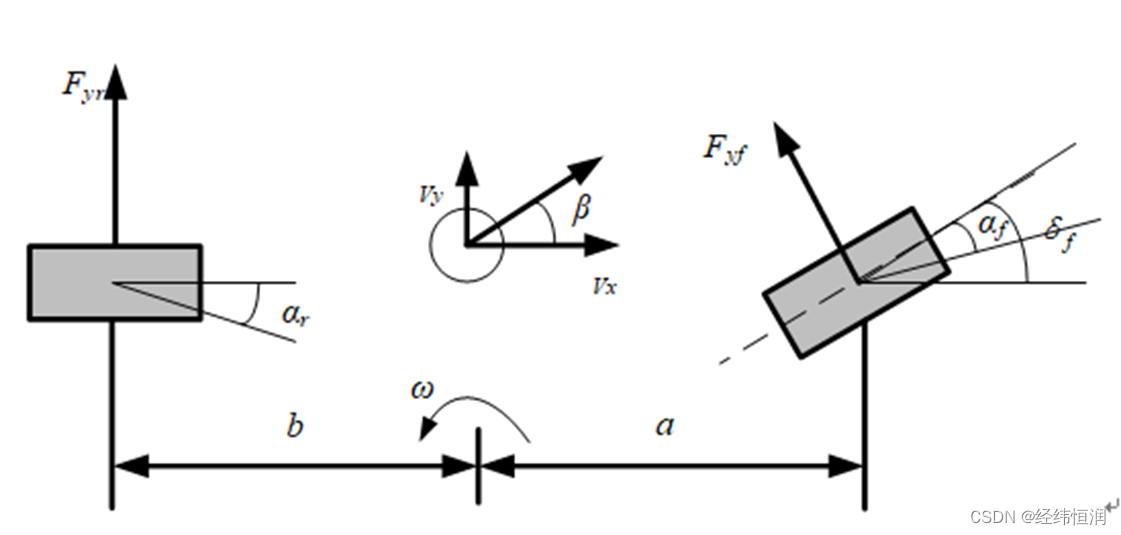
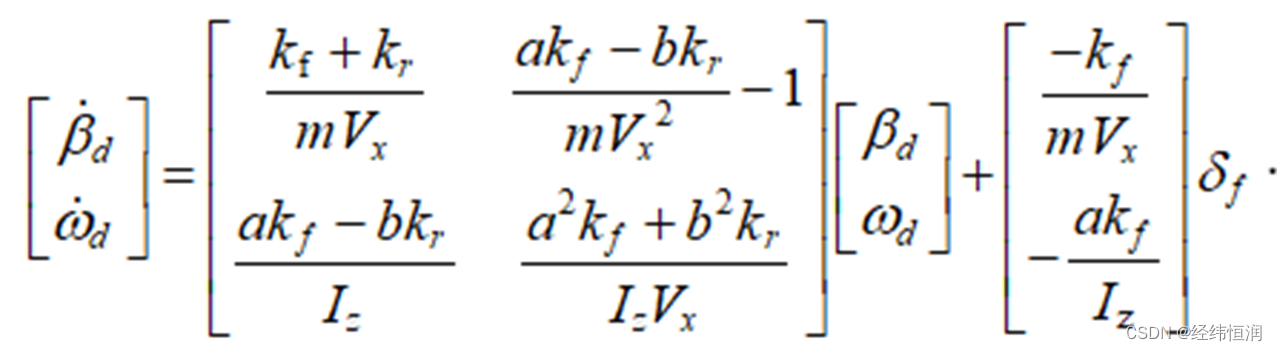
建立如上图所示的二自由度车辆动力学模型,忽略轮胎纵向力对侧偏特性的影响,具体动力学方程如下:
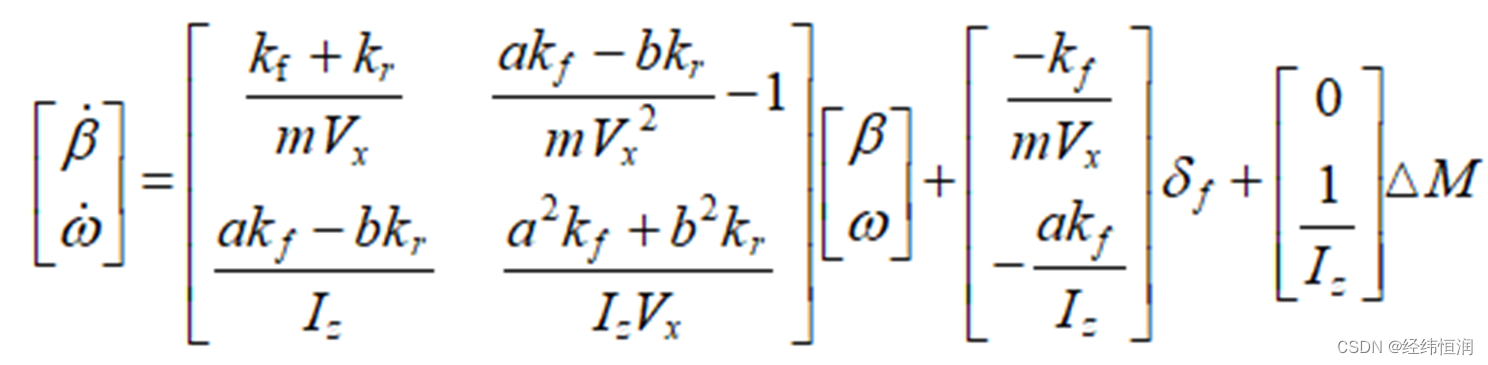
为保持车身稳定,轮毂电机驱动对四轮施加直接横摆力矩M,总附加横摆力矩作用后,动力学方程更新为:
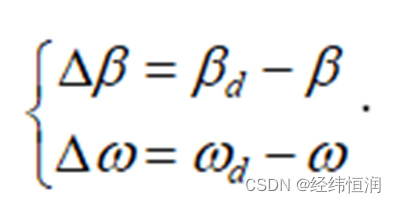
定义理想质心侧偏角与实际响应值的差、理想横摆角速度与实际响应值的差为:
求导得: 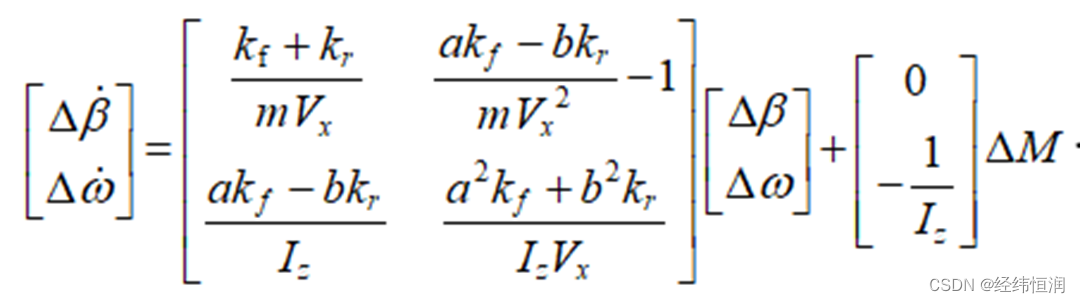

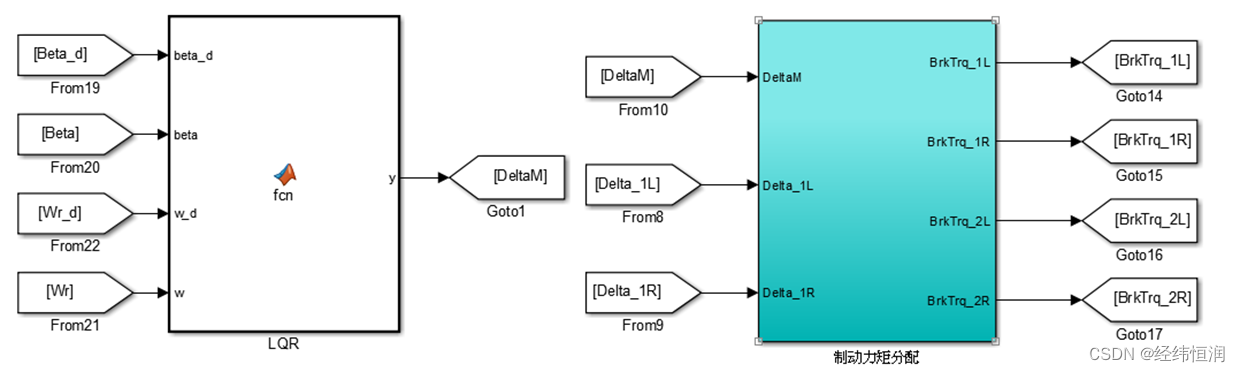
为消除误差,求出附加横摆力矩最优解,基于LQR理论设计控制方程:
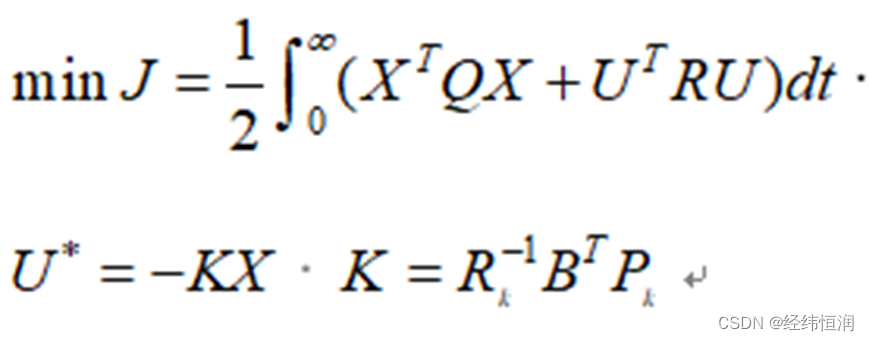
式中,K为反馈系数矩阵,Q矩阵能使系统误差快速逼近0,R矩阵限制系统最大量,避免输出超出轮毂电机负载的横摆力矩。输出的总附加横摆力矩U将平均分配至各轮毂电机。
ModelBase与Simulink的联合仿真
设置一辆未施加控制的对比车辆,两车初始车速都为60km/h,令其在路面附着系数为0.85的道路上跑路线,联合仿真动画效果如下。
DYC控制对比联合仿真动画
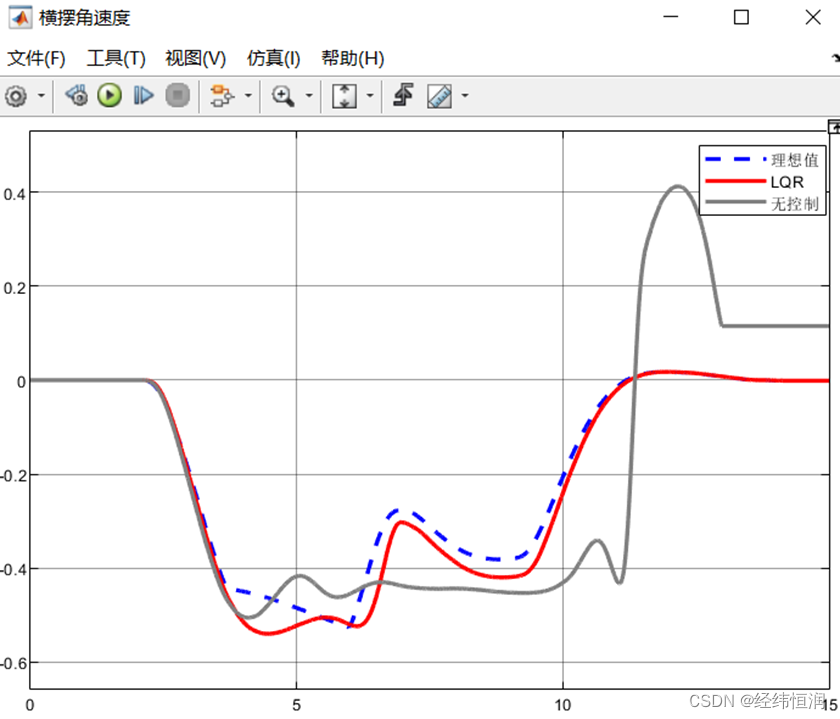
从下图可看出,在基于LQR的DYC控制下,车辆的横摆角速度相比无控制更加贴合理想值,质心侧偏角大部分时间内也更加贴合理想值,车辆转向时更加稳定。
横摆角速度(rad/s)变化曲线:
质心侧偏角(rad)变化曲线: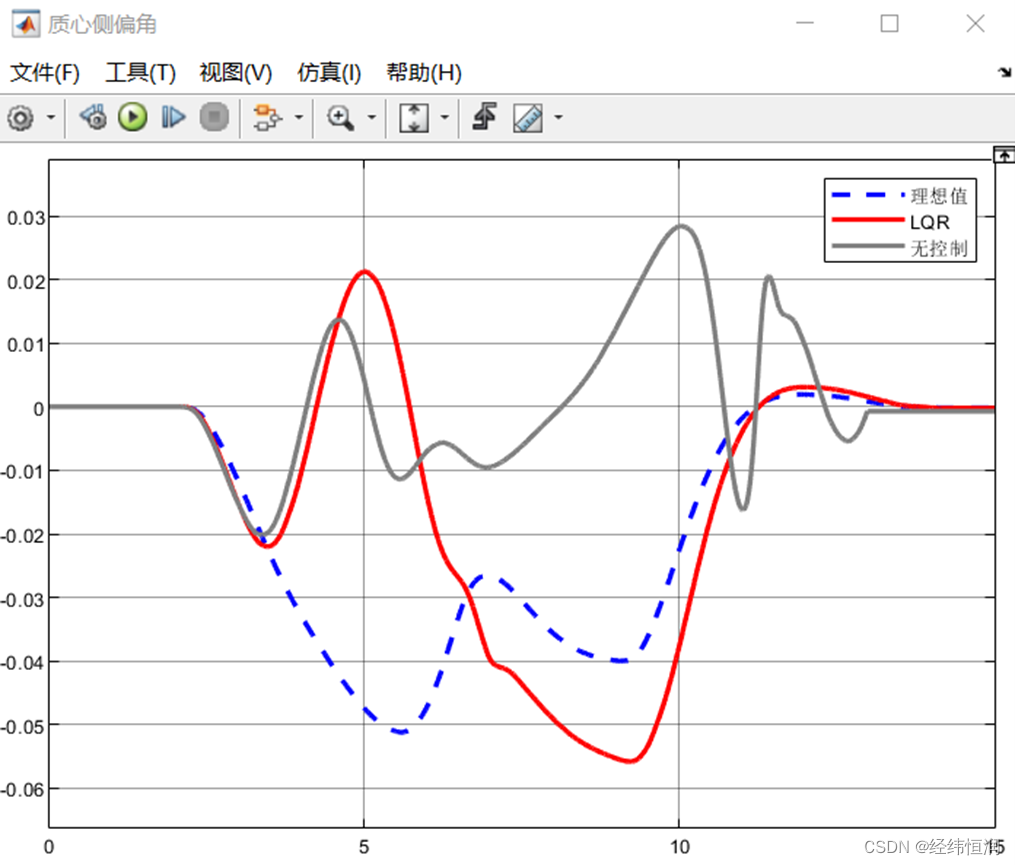 ______________________________________
______________________________________
ModelBase软件包含了用于上述仿真测试的工程和Simulink模型,ModelBase软件可免费申请试用,只需要发送【姓名、联系电话、邮箱、公司/学校名称、部门/院系、申请版本(动力学版本/智能驾驶版本)】信息到intework@hirain.com即可。点击链接查看ModelBase详细介绍。