CCP协议学习
一、CCP协议基础知识
a.CCP(CAN Calibration Protocol),中文名为CAN标定协议,是基于CAN总线的一种应用层协议。
b.CCP可以读取RAM、PORTS、ROM、FLASH,写RAM、PORTS、FLASH
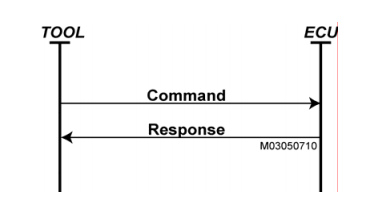
c.CCP协议采用主从通信方式,其流程可以简化为选择从机——选择控制方式——接收数据——断开连接
d.CCP报文有两种,一种是CRO: Command Receive Object , 即命令接收对象,一种是DTO:Data Transmission Object,数据传输对象。结合CCP的主从通信模式,可以说CRO为指令报文,DTO为应答报文。
e.CCP工作模式,Polling(查询模式):一问一答,DAQ(DATA Acquistion模式)托管模式
ASMA标准:
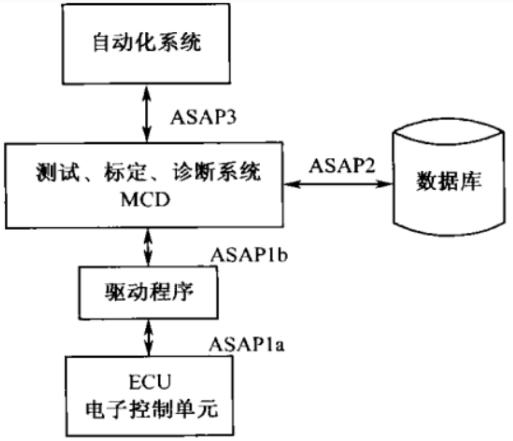
ASAM1a:定义ECU与校准/测量系统间的逻辑与物理接口(协议);
ASAM1b:定义应用程序与校准/测量系统间的接口(软件接口、MCS驱动);
ASAM2:定义数据库,包括标定数据库(A2L数据)和诊断数据库(Open Diagnostic data eXchange),ASAM2中记录了ECU中各项参数详细信息,如标定参数和测量变量ECu中存储地址、存储结构、数据类型和转换公式。CANape中,每个标定参数和测量数据都会有一个变量名,如发动机温度、冷却水温度。当CANape需要访问某个变量时,找到ASAP2描述文件中变量名,找到该变量在ECU中的存储地址、数据长度等信息。为了对ASAP2文件进行维护和修改,CANape集成了一个ASAP2 Editor的数据库编辑器,生成和修改ASAP2控制器描述文件。所有信息都能对话框形式进行设置和修改。该数据库编辑器还能工作在独立模式下,以生成一个A2L格式的控制器描述文件。 当ECU底层程序修改后,一些标定参数和测量数据内存址可能发生变动,CANape支持linker map文件自动更新ASAP2文件里的信息。Map文件是ECU底层程序编译时由编译器生成一种映射文件,Map文件可以自动更新ASAP2文件,保证了测量与标定变量时地址的一致性。
ASAM3:操作和控制标定系统的远程接口;
二、CCP报文帧
a. 报文帧基本格式
CRO报文:CCP报文帧格式为CMD + CTR + DATA,即Command、Counter、Data,其中Command是一些列的命令标号,为人为规定,Counter计数用,Counter根据发送消息的先后顺序进行赋值,例如第一条发送的CRO其CTR为01,相对应的,从机对其进行应答的相应报文的CTR值也应该为01,第二条的CTR值为02,以此类推。CCP协议共规定了28条命令。

DTO报文:分为三种类型报文,分别是CRM-DTO(命令返回消息),EVENT-DTO(事件消息),DAQ-DTO

CRM-DTO和EVENT-DTO共用上一种报文结构,第一个字节PID(data packet ID)用于判断报文属于那一类型,PID = 0xFF为CRM,PID = 0xFE为EVENT,其它的都是DAQ,第二个字节ERR(error code),第三个字节为代码指令计数器CTR,其它字节为指令代码相关的返回参数和数据
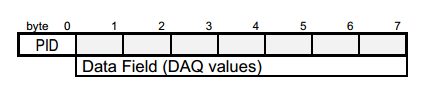
DAQ-DTO(数据采集)报文除了第一个字节为PID外,其余字节都是返回数据
b.报文帧格式解析
PID |
定 义 |
|||||
0xFE |
DTO是CRM-DTO |
|||||
0xFF |
DTO是EVENT-DTO |
|||||
0~0xFD |
DTO是DAQ-DTO |
|||||
Error:对于CRM-DTO来说,Error反映了CRO所请求命令的执行情况,例如返回了0x00,表明CRO命令正确执行命令。对于事件消息EVENT-DTO,Error的数值表示ECU内部发生了那种错误
c.报文帧含义
CRM-DTO发生在Polling模式下,是针对主设备发送的CRO消息的应答
EVENT-DTO事件消息发生在ECU内部错误时由ECU主动发送,这类DTO不需要事先收到主设备的CRO,一旦ECU发生内部错误,会主动向主设备发生这一消息,报告内部情况。
三、DAQ下的通信
DAQ模式下,设备从机可以脱离主设备的命令控制,自动按照一定周期向主设备上传数据,此模式中,需要主设备先发送一条请求DAQ命令,从设备接收到之后会按照命令中参数自行配置并上传数据,然后按一定周期自主向主设备上传数据,这种方法工作效率高,但实现较为复杂,上传数据量偏大,会大量占用ECU空间。
DAQ通信需要依靠DAQ列表,ODT列表,DAQ-ODT来实现
ODT(Obiect Descriptor Table):元素(变量)列表,用于组织数据采集
a.DAQ列表
按照不同的上传周期,ECU内部需要多个DAQ列表。例如有三个信号,上传周期分别为10ms、20ms、30ms,那么就需要3个DAQ列表,而同一上传周期的数据/变量(OTD)都被归类在同一个DAQ列表内,这些ODT被称作ODT列表,一个DAQ列表内部最多可以包含7个ODT列表。
b.ODT列表
七个ODT组成一个ODT列表,每一个ODT的最大元素数目为7,可以存放7个单字节数据变量的信息,其内容包括数据变量的存放地址,数据长度及其偏移地址。ODT列表需要通过DAQ-DTO方式才能向主设备发送,由于每一个ODT都有唯一的绝对编号,该编号即为DAQ-DTO的PID,排在最前面的ODT相对编号为0。绝对编号是对于所有ODT来说的,每一个ODT的绝对编号都不相同。相对编号是相对于当前DAQ列表而言,不同DAQ列表的ODT,其相对编号可能会相同。正是因为单帧有八字节数据,而ODT编号需要占用一字节,因此在DAQ-DTO中只剩下7字节来用于ODT的传输,而又因为CCP无法进行跨帧的数据/命令传输,所以一个ODT最大只能存储7字节数据。又因为PID的长度为8位,因此ODT的总数不能超过254个(0~0xFD)(通过修改PID长度可以增加ODT总数,但会减少单个ODT的长度)
c.DAQ通信设置
在使用DAQ通信前,主设备需要对DAQ列表及ODT列表进行配置
获取ECU内部DAQ列表数量和ODT数目,DAQ列表数量由上传的数据周期决定,每个不同周期对应一个DAQ列表。ODT列表数则由每个周期下上传的数据个数及长度决定
向相应的ODT填入数字,及数据的存储地址和数据长度,随后根据类型和上传周期被写在不同DAQ的不同ODT中
上传周期由事件通道(Event Channel)和预分频值(Prescaler)决定.事件周期可以理解为ECU每多少ms触发一次,若为10,则说明ECU每10ms触发一次该事件。预分频值可以理解为:以事件通道的时间为基准进行分频,我们以此来复用事件通道。若预分频值设定为2,则将某一事件以20ms的周期进行触发,但使用的仍然是同一个DAQ列表。
启动DAQ,进行数据采集
四、CCP命令
a.CCP命令即返回码和错误类别
11个基本指令
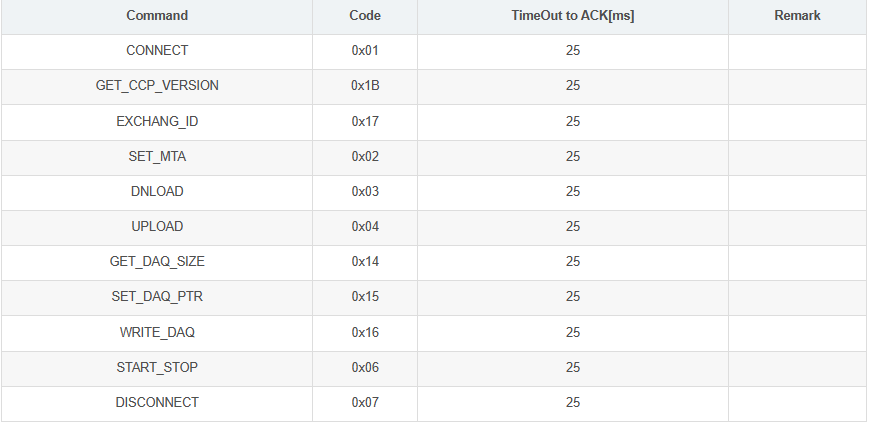
17个可选指令
命令返回码和错误类别
代码 |
描述 |
错误等级 |
备注 |
0x00 |
确认/无错误 |
—— |
|
0x01 |
DAQ处理器超载 |
C0 |
无(等待直到ACK或时间溢出) |
0x10 |
指令处理器忙 |
C1 |
无(等待直到ACK或时间溢出) |
0x11 |
DAQ处理器忙 |
C1 |
无(等待直到ACK或时间溢出) |
0x12 |
内部超时 |
C1 |
无(等待直到ACK或时间溢出) |
0x18 |
请求密钥 |
C1 |
无(等待直到ACK或时间溢出) |
0x19 |
阶段状态请求 |
C1 |
无(等待直到ACK或时间溢出) |
0x20 |
冷启动请求 |
C2 |
冷启动 |
0x21 |
标定数据初始化请求 |
C2 |
标定数据初始化 |
0x22 |
DAQ列表初始化请求 |
C2 |
DAQ列表初始化 |
0x23 |
更新代码请求 |
C2 |
(冷启动) |
0x30 |
未知指令 |
C3 |
(错误) |
0x31 |
指令语法错误 |
C3 |
错误 |
0x32 |
参数超出许可范围 |
C3 |
错误 |
0x33 |
访问被拒绝 |
C3 |
错误 |
0x34 |
超载 |
C3 |
错误 |
0x35 |
访问锁止保护 |
C3 |
错误 |
0x36 |
资源/功能咱不可用 |
C3 |
错误 |
错误等级:
C0:警告
C1:伪错误
C2:可修复错误
C3:不可修复
b.CCP命令详解
连接(CONNECT 0x01)
此命令用于连接ECU,若在同一网络上使用此命令连接一个新的ECU,则将会断开与原来ECU的连接,如果连接已连接的ECU,则会返回一个确认信息。CCP虽然支持Intel或Motorola的数据格式,但是在CONNECT中仅支持Intel格式(LSB)。
CONNECT的CRO结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x01 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
ECU地址(Intel格式,低字节在前) |
3~7 |
字节 |
无效 |
针对CONNECT的命令反馈DTO结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
PID = 0xFF |
1 |
字节 |
命令返回代码 = ERR(一般是0) |
2 |
字节 |
命令符号 = CTR(与发送的CRO的CTR一致) |
3~7 |
字节 |
无效 |
交换站标识符(EXCHANGE_ID 0x17)
在ASAP标准中,MCD(主设备)与ECU的通信需要ASAP2文件的支持,通过这个命令,自动化系统可以由DTO返回的ID标识符自动为ECU分配一ASAP文件
EXCHANGE_ID的CRO结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x17 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
ECU地址(Intel格式,低字节在前) |
3~7 |
字节 |
无效 |
EXCHANGE_ID的DTO结构如下
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x17 |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令符号 = CTR |
3 |
字节 |
从设备ID标识符的长度(字节数) |
4 |
字节 |
从设备ID数据类型(可选字节,视实际应用而定) |
5 |
字节 |
资源可用状态字节 |
6 |
字节 |
资源保护状态字节 |
7 |
字节 |
无效 |
为了防止可能发生的对ECU的误操作,会对某些功能通过密钥进行保护。EXCHANGE_ID的第5、第6字节反映了这些特殊功能是否正处于保护状态。其字节结构定义如下:
bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
—— |
X |
PGM |
X |
X |
X |
X |
DAQ |
CAL |
CAL:标定 DAQ:DAQ通信模式 PGM:非易失性内存烧写 X:暂时无效
对于资源可用状态字节,某位置1则说明当前该项功能未受保护,可以启用。对于资源保护状态字节,某位置1则说明当前该项功能受密钥保护,需要权限才能对其进行访问。
申请密钥(GET_SEED 0x12)
若某项功能处于保护状态,主设备需要通过GET_SEED命令向ECU申请解开该功能的密钥。GET_SEED每次只能解锁一项功能,如果请求开放的资源多于一项,需要多次并用GET_SEED与UNLOCK命令。从设备通过DTO返回密钥数据,主设备通过密钥解算出某个功能的钥匙,使主设备有权限访问某项功能。
GET_SEED的CRO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x12 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
请求设备开放的功能 |
3~7 |
字节 |
无效 |
针对GET_SEED命令的DTO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
请求功能当前受保护状态(真或者假) |
4~7 |
字节 |
密钥数据 |
解除保护(UNLOCK 0x13)
UNLOCK的CRO数据常结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x13 |
1 |
字节 |
命令符号 = CTR |
2~7 |
字节 |
钥匙 |
其返回的DTO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
各项功能当前状态 |
4~7 |
字节 |
无效 |
设置MTA地址(SET_MTA 0x02)
SET_MTA命令用于设置一个初始地址(32位基地址+地址偏移),后续对内存的读取操作都由该起始地址开始。
CCP协议一共规定了两个MTA地址:MTA0与MTA1,分别针对不同的命令。DNLOAD、UPLOAD、DNLOAD_6、SELECT_CAL_PAGE、CLEAR_MEMORY、PROGRAM及PROGRAM_6命令使用MTA0,MOVE命令使用MTA1。
SET_MTA命令CRO的数据常结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x02(SET_MTA) |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
MTA序号(0或1) |
3 |
字节 |
地址偏移 |
4~7 |
无符号长整型 |
地址 |
针对SET_MTA命令返回DTO的数据场结构,如下所示
位置 |
类型 |
描述 |
0 |
字节 |
PID:0xFF |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
例:主设备向从设备发送SET_MTA命令,当前CTR为0x23,MTA序号为0,地址偏移为0x02,基地址为0x34002000则该SET_MTA命令应为
bit |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
—— |
0x02 |
0x23 |
0x00 |
0x02 |
0x34 |
0x00 |
0x20 |
0x00 |
从设备返回DTO,包括确认代码ERR,CTR
bit |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
—— |
0xFF |
0x00 |
0x23 |
—— |
—— |
—— |
—— |
—— |
6. 数据下载(DNLOAD 0x03)
DNLOAD指令负责将CRO中的数据下载到ECU中,起始地址为先前设定的MTA0,下载完毕后MTA0指针自增,自增的字节数为下载的字节数。DNLOAD命令的CRO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x03 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
下载数据大小 |
3~7 |
字节 |
下载数据(最多为5个字节) |
针对DNLOAD命令返回DTO的数据场结构
位置 |
类型 |
描述 |
0 |
字节 |
PID:0xFF |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
MTA0偏移量(自增后) |
4~7 |
无符号长整型 |
MTA0地址(自增后) |
7. 6字节数据下载(DNLOAD_6 0x23)
此命令与DNLOAD功能相同,但此命令可以一次性下载6字节数据,其CRO结构除第一个字节的命令代码不同外,DNLOAD中第三个字节也应为数据位
8.数据上传(UPLOAD 0x04)
此命令请求设备以MTA0为起始地址,将命令中规定字节数的数据上传,随后MTA0指针自动增加相应的字节数。UPLOAD命令的数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x04 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
请求上传的数据大小(字节数) |
3~7 |
字节 |
无效 |
其命令返回DTO的数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
所请求的数据 |
9.数据短上传(SHORT_UP 0x0F)
该命令功能等同于UPLOAD命令,区别在于UPLOAD命令上传数据的起始地址是MTA0,SHORT_UP的起始地址由命令本身指定,从设备按该起始地址上传数据。上传后MTA0指针保持不变。SHORT_UP命令的CRO数据场结构如下
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x0F |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
请求上传的数据大小(字节数) |
3 |
字节 |
地址偏移量 |
4~7 |
无符号长整型 |
地址 |
其返回DTO的数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
所请求的数据 |
10.选择标定数据页(SELECT_CAL_PAGE 0x11)
该命令的功能取决于ECU的内部实现。执行该调命令后,先前设置的MTA0地址将会自动指向由该命令激活的标定页。其CRO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x11 |
1 |
字节 |
命令序号 = CTR |
2~7 |
字节 |
无效 |
其DTO如下
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
11.获取DAQ列表大小(GET_DAQ_SIZE 0x14)
此命令用于获取某特定DAQ列表的大小,即其中ODT列表的个数,并清空当前DAQ列表内的数据,为下次通讯做准备,如果GET_DAQ_SIZE命令中选定的DAQ列表不存在或者不可用,,从设备返回的ODT列表个数为0。该命令的CRO数据场如下所示
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x14 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
DAQ列表序号 |
3 |
字节 |
无效 |
4~7 |
无符号长整型 |
读DAQ列表,其所对应的DTO的CAN ID标识符 |
下面是该命令返回的DTO的数据场结构
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
DAQ列表大小(ODT列表数) |
4 |
字节 |
DAQ列表的第一个PID号 |
5~7 |
字节 |
无效 |
DAQ中的某高官ODT的PID号可以通过计算得来,其值为DAQ列表中的第一个PID号+ODT数目
12.设置DAQ列表指针(SET_DAQ_PTR 0x15)
在进行DAQ通讯前,必须将DAQ列表进行配置,将数据写入到相应的DAQ列表里的ODT元素中。SET_DAQ_PTR用来为写入DAQ列表数据设置入口地址指针。其CRO数据场结构如下所示。
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x15 |
1 |
字节 |
命令符号 = CTR |
2 |
字节 |
DAQ列表序号 |
3 |
字节 |
ODT学号 |
4 |
字节 |
该ODT中的第几个元素 |
5~7 |
无符号长整型 |
无效 |
SET_DAQ_PTR命令返回DTO的数据场结构,如下所示
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
13.写入DAQ列表(WRITE_DAQ 0x16)
在DAQ通信前,需要对DAQ列表进行配置,将需要上传的数据先写到DAQ列表所在的ODT列表中,先前由SET_DAQ_PTR命令所定义的地址即为该命令的数据写入地址,在此命令中,一次写入的数据被成为一个DAQ元素,其字节可分为1字节、2字节、4字节。下面为该命令的CRO数据场结构
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x16 |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
DAQ元素的大小 |
3 |
字节 |
DAQ元素的地址偏移 |
4~7 |
无符号长整型 |
DAQ元素的地址 |
针对WRITE_DAQ命令返回DTO的数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
14.开始/终止数据传输(START_STOP 0x06)
该条命令用于DAQ通信模式,其作用是开始或终止某个DAQ列表的数据上传,其数据场结构如下表所示
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x06 |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
模式:开始/终止/准备数据传输 |
3 |
字节 |
DAQ列表符号 |
4 |
字节 |
最后一个ODT符号 |
5 |
字节 |
事件通道号 |
6~7 |
字 |
传输速率预分频值 |
对于第3个字节,0x00代表终止某DAQ列表的数据传输
0X02代表为开始同步传输做准备
0x01代表开始某DAQ列表的数据传输
命令中的事件通道号对应DAQ列表上传的周期,通过预分频值可延长上传周期,预分频值必须大于或等于1。针对START_STOP命令返回DTO的数据场结构如下所示。
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
15.断开(DISCONNECT 0x07)
断开分为两种模式,一种离线模式,一种扯断断开与ECU的通信,彻底断开通信时,ECU将会被自动初始化。暂时断开即离线模式不会终止与当前ECU的DAQ通信,也不会影响先前的各项设置。在该命令中的ECU地址采用Intel格式,低位在前。其CRO数据场结构如下所示。
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x07 |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
命令参数:0x00:暂时断开;0x01:终止 |
3 |
字节 |
无效 |
4、5 |
字 |
ECU地址(Intel格式,低位在前) |
6、7 |
字节 |
无效 |
针对该命令返回的DTO数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
16.设置当前通信状态(SET_S_STATUS 0x0C)
从设备通过该条命令设置当前主从设备间的通信状态,其CRO数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x0C |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
状态字节 |
3~7 |
字节 |
无效 |
状态字节的定义表如下所示
位置 |
名称 |
描述 |
0 |
CAL |
标定数据初始化完成 |
1 |
DAQ |
DAQ列表初始化完成 |
2 |
RESUME |
请求ECU断电时自动保存DAQ列表设置,在下次启动时再自动启动DAQ列表 |
6 |
STORE |
请求ECU断电时保存标定数据 |
7 |
RUN |
正处于运行阶段 |
3~5 |
保留 |
保留 |
该命令返回DTO的数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
指令返回代码 |
2 |
字节 |
CTR |
3~7 |
字节 |
不关心 |
17.获取当前通信状态(GET_S_STATUS 0x0D)
主设备通过该条命令请求从设备提供当前通信状态,其CRO数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x0D |
1 |
字节 |
命令序号 = CTR |
2~7 |
字节 |
无效 |
针对GET_S_STATUS命令返回DTO的数据场结构如下所示
位置 |
名称 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
状态字节 |
4 |
字节 |
其它状态信息限定 |
5~7 |
字节 |
其他状态信息(可选) |
18.建立checksum表(BUILD_CHKSUM 0x0E)
checksum是CCP提供的一个可选功能,为了提高效率,在每次对ECU进行标定前,CCP支持先对需要进行标定的内存区域进行checksum算法,如果checknum结果与下载数据不一致,表明内存中的数据与标定数据不同。
主设备用该命令请求从设备对指定内存区域(起始地址为MTA0,大小由命令中的block大小决定)进行checksum计算,并返回计算结果。checknum算法由制造商根据实际应用决定,不属于CCP协议范畴。该命令的CRO数据场结构如下。
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x0E |
1 |
字节 |
命令序号 = CTR |
2~5 |
无符号长整形 |
block大小(以字节数标识) |
6、7 |
字节 |
无效 |
针对BUILD_CHKSUM命令返回DTO的数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
checksum数据长度 |
4~7 |
字节 |
checksum数据(根据实际应用而定) |
19.清空内存(CLEAR_MEMORYU 0x10)
此条命令可以用于在标定前清空FLASH EPROM中的数据,被清空区域的起始地址即是MTA0。CLEAR_MEMOY命令的CRO数据场结构如下所示
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x10 |
1 |
字节 |
命令序号 = CTR |
2~5 |
长整形 |
内存区域大小 |
3,6、7 |
字节 |
无效 |
针对CLEAR_MEMORY命令返回DTO的数据场结构如下
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
3~7 |
字节 |
无效 |
20.编程(PROGRAM 0x18)
不同于DNLOAD类命令,PROFRAM命令用以将一块大小确定的数据烧写到ECU的非易失性内存中,起始地址为MTA0,烧写结束后,MTA0按照烧写的字节数自增。其CRO数据域结构如下。
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x18 |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
数据大小 |
3~7 |
字节 |
数据(最多5个字节) |
该命令返回的DTO数据场结构如下
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
MTA0偏移(自增后) |
4 |
无符号长整型 |
MTA0地址(自增后) |
21.六字节编程(PROGRAM_6 0x22)
将编程(PROGRAM)中用于标注数据大小的字节用于装订数据,其他不变
22.内存转移(MOVE 0x19)
MOVE指令可将固定长度的一块内存区域中的内容由MTA0起始地址转移到MTA1起始地址处。MOVE命令的CRO数据场结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
指令返回代码 |
2~5 |
长整型 |
CTR |
6、7 |
字节 |
不关心 |
其DTO的数据场结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
指令返回代码 |
2 |
字节 |
CTR |
3~7 |
字节 |
不关心 |
23.诊断服务(DIAG_SERVICE 0x20)
该条命令使从设备自动指向主设备请求的诊断服务,MTA0会自动重新定位,主设备从新的MTA0起始地址出获取诊断服务的反馈信息。其数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x20 |
1 |
字节 |
命令序号 = CTR |
2、3 |
字 |
诊断服务号 |
4~7 |
字节 |
附加参数(如果有) |
针对DIAG_SERVICE返回的DTO数据场结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
反馈信息长度(字节数) |
4 |
字节 |
反馈信息数据类型限定 |
5~7 |
字节 |
无效 |
24.操作服务(ACTION_SERVICE 0x21)
同DIAG_SERVICE命令,主设备通过该命令请求从设备自动指向某项操作,MTA0将自动重新定位,主设备可从新的MTA0起始地址处获取所请求操作服务的反馈信息
其CRO结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x21 |
1 |
字节 |
命令序号 = CTR |
2、3 |
字 |
请求操作服务函数 |
4~7 |
字节 |
附加参数(如果有) |
其DTO结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
反馈信息长度(字节数) |
4 |
字节 |
反馈信息数据类型限定 |
5~7 |
字节 |
无效 |
25.连接状态测试(TEST 0x05)
测试连接使用该命令,命令消息中的ECU地址使用Intel格式,其CRO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x05 |
1 |
字节 |
命令序号 = CTR |
2、3 |
字 |
ECU地址(Intel格式,低字节在前) |
4~7 |
字节 |
无效 |
其DTO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0xFF |
1 |
字节 |
命令序号 = ERR |
2 |
字节 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
26.开始/停止同步数据传输(START_STOP_ALL 0x08)
在先前的START_STOP命令中,如果模式命令值为0x02,则对DAQ列表进行标识,为同步数据传输做准备。其CRO数据场结构如下:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x08 |
1 |
字节 |
命令序号 = CTR |
2 |
字 |
0x00停止数据传输;0x01开始数据传输 |
3~7 |
字节 |
无效 |
其返回DTO的数据场结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字 |
命令序号 = CTR |
3~7 |
字节 |
无效 |
27.获取处于激活状态下的标定页(GET_ACTIVE_CAL_PAGE 0x09)
该命令的功能是返回当前处于激活状态下的首地址:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x09 |
1 |
字节 |
命令序号 = CTR |
2~7 |
字 |
无效 |
针对GET_ACTIVE_CAL_PAGE命令返回DTO的数据场结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = ERR |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
地址偏移 |
4~7 |
无符号长整型 |
首地址 |
28.获取CCP协议版本(GET_CCP_VERSION 0x1B)
该命令用于统一主、从设备所使用的CCP协议版本,该命令应在EXCHANGE_ID命令之前执行,GET_CCP_VERSION命令的CRO数据场结构如下所示:
位置 |
类型 |
描述 |
0 |
字节 |
命令代码 = 0x1B |
1 |
字节 |
命令序号 = CTR |
2 |
字节 |
协议主版本号(期望值) |
3 |
字节 |
协议副版本号(期望值) |
4~7 |
字节 |
无效 |
针对其返回的DTO数据场结构如下
位置 |
类型 |
描述 |
0 |
字节 |
PID |
1 |
字节 |
命令返回代码 = EER |
2 |
字节 |
命令序号 = CTR |
3 |
字节 |
从设备所使用的协议主版本号 |
4 |
字节 |
从设备所使用的协议副版本号 |
5~7 |
字节 |
无效 |
注:若协议版本为2.1则主版本号为2,副版本号为1