强化学习—— 离散与连续动作空间(随机策略梯度与确定策略梯度)
强化学习—— 离散与连续动作空间(随机策略梯度与确定策略梯度)
1. 动作空间
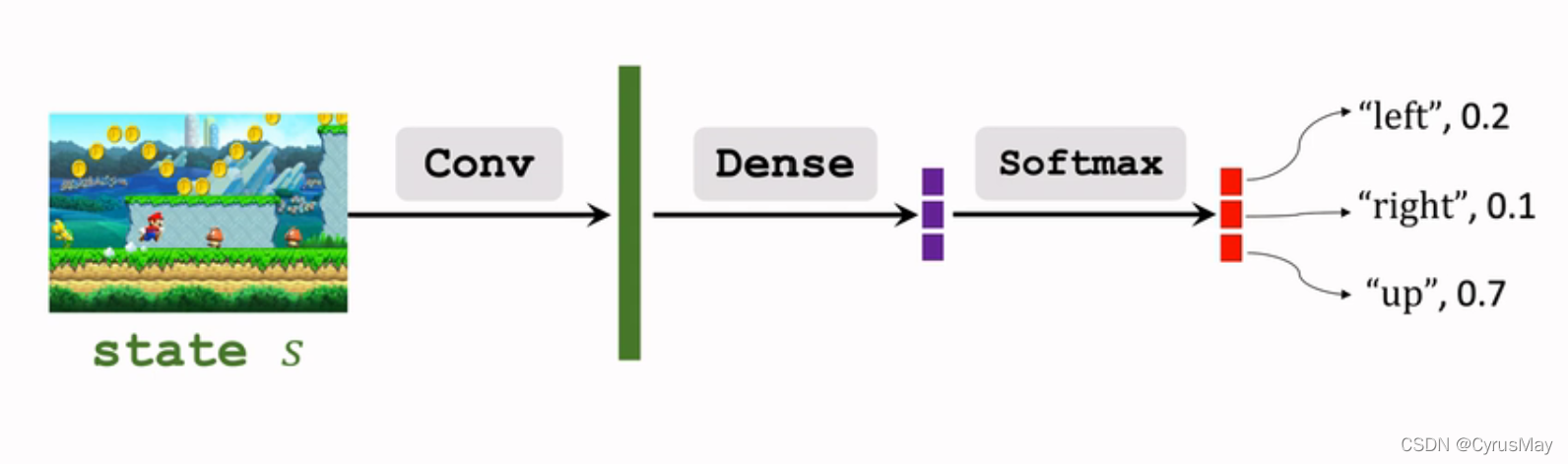
1.1 离散动作空间
- 比如: { l e f t , r i g h t , u p } {left,right,up} {left,right,up}
- DQN可以用于离散的动作空间(策略网络)
1.2 连续动作空间
- 比如:
A
=
[
0
∘
,
18
0
∘
]
∗
[
0
∘
,
36
0
∘
]
A=[0^{circ} ,180^{circ} ]*[0^{circ} ,360^{circ} ]
A=[0∘,180∘]∗[0∘,360∘]
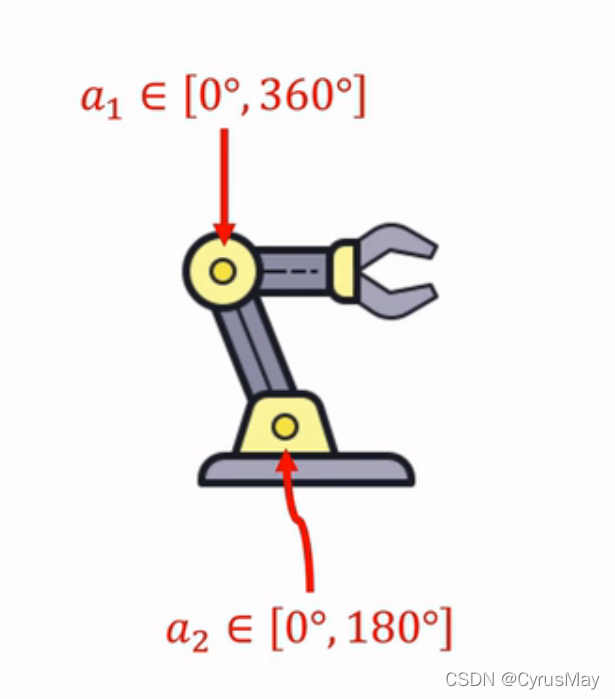
- 连续动作空间的两种处理方式:
- 离散化(discretization):比如机械臂进行二维网格划分。假设d为连续动作空间的自由度,动作离散化后的数量会随着d的增加呈现指数增长,从而造成维度灾难。
- 使用确定策略梯度。
- 使用随机策略梯度。
2. 确定策略梯度做连续控制
- 动作空间为 R d R^d Rd的一个子集
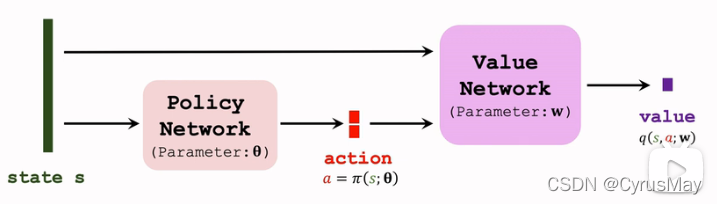
2.1 确定策略梯度推导
- 确定策略网络: a = π ( s ; θ ) a = pi(s;theta) a=π(s;θ)
- 价值网络(输出为一个标量):
q
(
s
,
a
;
W
)
q(s,a;W)
q(s,a;W)
网络学习过程为:
- 观测到一个transition: ( s t , a t , r t , s t + 1 ) (s_t,a_t,r_t,s_{t+1}) (st,at,rt,st+1)
- 计算t时刻价值网络的函数值: q t = q ( s t , a t ; W ) q_t = q(s_t,a_t;W) qt=q(st,at;W)
- 计算t+1时刻价值网络的函数值: a t + 1 − = π ( s t + 1 ; θ ) q t + 1 = q ( s t + 1 , a t + 1 − ; W ) a_{t+1}^-=pi(s_{t+1};theta)\q_{t+1}=q(s_{t+1},a_{t+1}^-;W) at+1−=π(st+1;θ)qt+1=q(st+1,at+1−;W)
- TD Error为: δ t = q t − ( r t + γ ⋅ q t + 1 ) delta_t=q_t-(r_t+gammacdot q_{t+1}) δt=qt−(rt+γ⋅qt+1)
- 更新价值网络: W ← W − α ⋅ ∂ q ( s t , a t ; W ) ∂ W Wgets W-alphacdotfrac{partial q(s_t,a_t;W)}{partial W} W←W−α⋅∂W∂q(st,at;W)
- 更新策略网络所需的策略梯度推导: 策 略 网 络 的 目 标 为 通 过 策 略 网 络 a = π ( s ; θ ) 做 出 的 决 策 可 以 增 加 价 值 网 络 q = q ( s , a ; W ) 的 值 。 因 此 确 定 策 略 梯 度 ( d e t e r m i n i s t i c p o l i c y g r a d i e n t , D P G ) 为 : g = ∂ q ( s , π ( s ; θ ) ; W ) ∂ θ = ∂ q ( s . π ( s ; θ ) ; W ) ∂ π ( s ; θ ) ⋅ ∂ π ( s ; θ ) ∂ θ 策略网络的目标为通过策略网络a=pi(s;theta)\做出的决策可以增加价值网络q=q(s,a;W)的值。\ 因此确定策略梯度(deterministic policy gradient, DPG)为:\ g=frac{partial q(s,pi(s;theta);W)}{partial theta}=frac{partial q(s.pi(s;theta);W)}{partial pi(s;theta)}cdot frac{partial pi(s;theta)}{partial theta} 策略网络的目标为通过策略网络a=π(s;θ)做出的决策可以增加价值网络q=q(s,a;W)的值。因此确定策略梯度(deterministicpolicygradient,DPG)为:g=∂θ∂q(s,π(s;θ);W)=∂π(s;θ)∂q(s.π(s;θ);W)⋅∂θ∂π(s;θ)
- 依据确定策略梯度进行策略网络参数更新: g = ∂ q ( s , π ( s ; θ ) ; W ) ∂ θ = ∂ q ( s . π ( s ; θ ) ; W ) ∂ π ( s ; θ ) ⋅ ∂ π ( s ; θ ) ∂ θ θ ← θ + β ⋅ g g=frac{partial q(s,pi(s;theta);W)}{partial theta}=frac{partial q(s.pi(s;theta);W)}{partial pi(s;theta)}cdot frac{partial pi(s;theta)}{partial theta}\ thetagets theta+betacdot g g=∂θ∂q(s,π(s;θ);W)=∂π(s;θ)∂q(s.π(s;θ);W)⋅∂θ∂π(s;θ)θ←θ+β⋅g
2.2 确定策略梯度网络的改进
2.2.1 使用Target网络
Bootstrapping现象:
- TD Target为: δ t = q t − ( r t + γ ⋅ q t − 1 ) delta_t =q_t-(r_t+gammacdot q_{t-1}) δt=qt−(rt+γ⋅qt−1)
- 价值网络使用到了自己的估计来更新自己,因而会造成连续高估或低估
- 解决方案为:使用不同的神经网络来进行TD Target计算
Target网络的核心思想:
- 使用价值网络计算 t t t时刻的价值函数值: q t = q ( s t , a t ; W ) q_t = q(s_t,a_t;W) qt=q(st,at;W)
- 使用另外两个结构与价值网络和策略网络一致的神经网络计算t+1时刻的价值函数值和动作向量: a t + 1 − = π ( s t + 1 ; θ − ) q t + 1 = q ( s t + 1 , a t + 1 − ; W − ) a_{t+1}^-=pi(s_{t+1};theta^-)\q_{t+1}=q(s_{t+1},a_{t+1}^-;W^-) at+1−=π(st+1;θ−)qt+1=q(st+1,at+1−;W−)
采用Target网络的具体学习步骤为:
- 策略网络进行决策: a t = π ( s t ; θ ) a_t=pi(s_t;theta) at=π(st;θ)
- 采用确定策略梯度(DPG)更新策略网络: θ ← θ + β ⋅ ∂ q ( s t , π ( s t ; θ ) ; W ) ∂ π ( s t ; θ ) ⋅ ∂ π ( s t ; θ ) ∂ θ thetagets theta+betacdot frac{partial q(s_t,pi(s_t;theta);W)}{partial pi(s_t;theta)}cdot frac{partial pi(s_t;theta)}{partial theta} θ←θ+β⋅∂π(st;θ)∂q(st,π(st;θ);W)⋅∂θ∂π(st;θ)
- 计算t时刻的价值网络函数值: q t = q ( s t , a t ; W ) q_t=q(s_t,a_t;W) qt=q(st,at;W)
- 使用Target网络计算t+1时刻的价值: a t + 1 − = π ( s t + 1 ; θ − ) q t + 1 = q ( s t + 1 , a t + 1 − ; W − ) a_{t+1}^-=pi(s_{t+1};theta^-)\q_{t+1}=q(s_{t+1},a_{t+1}^-;W^-) at+1−=π(st+1;θ−)qt+1=q(st+1,at+1−;W−)
- 计算TD Error: δ t = q t − ( r t + γ ⋅ q t + 1 ) delta_t=q_t-(r_t+gamma cdot q_{t+1}) δt=qt−(rt+γ⋅qt+1)
- 更新价值网络的参数: W ← W − α ⋅ δ t ⋅ ∂ q ( s t , a t ; W ) ∂ W Wgets W-alphacdot delta_t cdot frac{partial q(s_t,a_t;W)}{partial W} W←W−α⋅δt⋅∂W∂q(st,at;W)
Target 网络的参数更新步骤为:
- 设定超参数 τ ∈ [ 0 , 1 ] tau in [0,1] τ∈[0,1]
- 将价值网络、策略网络与Target网络的参数进行加权平均,从而实现参数更新: θ − = τ ⋅ θ + ( 1 − τ ) ⋅ θ − W − = τ ⋅ W + ( 1 − τ ) ⋅ W − theta^- = taucdottheta+(1-tau)cdot theta^-\W^-=taucdot W+(1-tau)cdot W^- θ−=τ⋅θ+(1−τ)⋅θ−W−=τ⋅W+(1−τ)⋅W−
2.2.2 其余改进
- 经验回放(experience replay)
- Multi-step TD Target
2.3 总结
| / | 随机策略网络 | 确定性策略网络 |
|---|---|---|
| 策略函数 | π ( a ∣ , s ; θ ) pi(a|,s;theta) π(a∣,s;θ) | a = π ( s ; θ ) a = pi(s;theta) a=π(s;θ) |
| 输出 | 动作空间的概率分布 | 确定的动作 a a a |
| 决策方式 | 根据动作空间的概率分布进行随机抽样 | 直接输出一个动作 a a a |
| 应用场景 | 多用于离散控制 | 连续控制 |
3. 随机策略网络进行连续控制
3.1 基本概念
- 折扣回报: U t = R t + γ ⋅ R t + 1 + γ 2 ⋅ R t + 2 + . . . U_t = R_t+gammacdot R_{t+1}+gamma^2cdot R_{t+2}+... Ut=Rt+γ⋅Rt+1+γ2⋅Rt+2+...
- 动作价值函数: Q π ( s t , a t ) = E [ U t ∣ S t = s t , A t = a t ] Q_pi(s_t,a_t)=E[U_t|S_t=s_t,A_t=a_t] Qπ(st,at)=E[Ut∣St=st,At=at]
- 状态价值函数: V π ( s t ) = E A t [ Q π ( s t , A t ) ] V_pi(s_t)=E_{A_t}[Q_pi(s_t,A_t)] Vπ(st)=EAt[Qπ(st,At)]
- 策略梯度: ∂ V π ( s t ) ∂ θ = E A t ∼ π [ Q π ( s t , A t ) ⋅ ∂ l o g ( π ( A t ∣ s t ; θ ) ) ∂ θ ] g ( A t ) = Q π ( s t , A t ) ⋅ ∂ l o g ( π ( A t ∣ s t ; θ ) ) ∂ θ frac{partial V_pi(s_t)}{partial theta}=E_{A_tsim pi}[Q_pi(s_t,A_t)cdotfrac{partial log(pi(A_t|s_t;theta))}{partial theta}]\g(A_t)=Q_pi(s_t,A_t)cdotfrac{partial log(pi(A_t|s_t;theta))}{partial theta} ∂θ∂Vπ(st)=EAt∼π[Qπ(st,At)⋅∂θ∂log(π(At∣st;θ))]g(At)=Qπ(st,At)⋅∂θ∂log(π(At∣st;θ))
- 进行蒙特卡洛近似后的策略梯度为: a t ∼ π ( ⋅ ∣ s t ; θ ) g ( a t ) = Q π ( s t , a t ) ⋅ ∂ l o g ( π ( a t ∣ s t ; θ ) ) ∂ θ a_tsimpi(cdot|s_t;theta)\g(a_t)=Q_pi(s_t,a_t)cdotfrac{partial log(pi(a_t|s_t;theta))}{partial theta} at∼π(⋅∣st;θ)g(at)=Qπ(st,at)⋅∂θ∂log(π(at∣st;θ))
3.2 策略网络
3.2.1 自由度为1的连续动作空间
- 假设 μ mu μ和 σ sigma σ为状态 s s s的函数
- 假设策略函数为正态分布的概率密度函数: π ( a ∣ s ) = 1 2 π ⋅ σ e − ( a − μ ) 2 2 σ 2 pi(a|s)=frac{1}{sqrt{2pi}cdotsigma}e^{-frac{(a-mu)^2}{2sigma^2}} π(a∣s)=2π⋅σ1e−2σ2(a−μ)2
3.2.2 自由度大于1(为 d d d)的连续动作空间
- 动作空间为d维向量
- μ mu μ和 σ sigma σ为状态 s s s的函数: s → R d sto R^d s→Rd
- μ i mu_i μi和 σ i sigma_i σi为 μ ( s ) mu(s) μ(s)和 σ ( s ) sigma(s) σ(s)的第 i i i个元素
- 则定义策略函数为: π ( a ∣ s ) = Π i = 1 d 1 2 π ⋅ σ i e − ( a − μ i ) 2 2 σ i 2 pi(a|s)=Pi_{i=1}^d frac{1}{sqrt{2pi}cdotsigma_i}e^{-frac{(a-mu_i)^2}{2sigma_i^2}} π(a∣s)=Πi=1d2π⋅σi1e−2σi2(a−μi)2
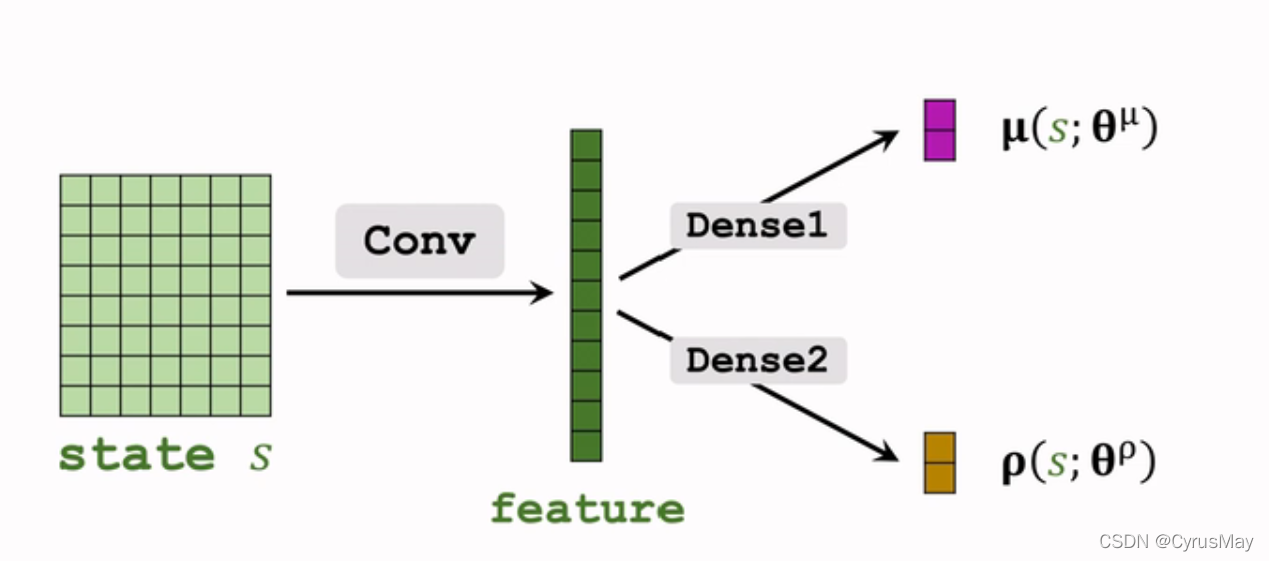
3.2.3 函数近似
- 对均值的近似: μ ( s ) ← μ ( s ; θ μ ) mu(s)gets mu(s;theta^mu) μ(s)←μ(s;θμ)
- 对方差的对数进行近似: ρ i = l o g ( σ i 2 ) i = 1 , 2 , . . . , d ρ ← ρ ( s ; θ ρ ) rho_i = log(sigma_i^2) quad i = 1,2,...,d\rhogets rho(s;theta^rho) ρi=log(σi2)i=1,2,...,dρ←ρ(s;θρ)
3.2.4 连续控制策略
- 观测到状态 s t s_t st
- 通过神经网络计算均值和方差: μ ^ = μ ( s t ; θ ) ρ ^ = ρ ( s t ; θ ) σ i ^ 2 = e ρ i i = 1 , 2 , . . . , d hat{mu}=mu(s_t;theta)\hat{rho}=rho(s_t;theta)\hat{sigma_i}^2=e^{rho_i} quad i = 1,2,...,d μ^=μ(st;θ)ρ^=ρ(st;θ)σi^2=eρii=1,2,...,d
- 进行随机抽样得到动作 a a a: a i ∼ N ( u i ^ , σ i ^ 2 ) i = 1 , 2 , . . . , d a_isim N(hat{u_i},hat{sigma_i}^2)quad i = 1,2,...,d ai∼N(ui^,σi^2)i=1,2,...,d
3.2.5 添加辅助神经网络
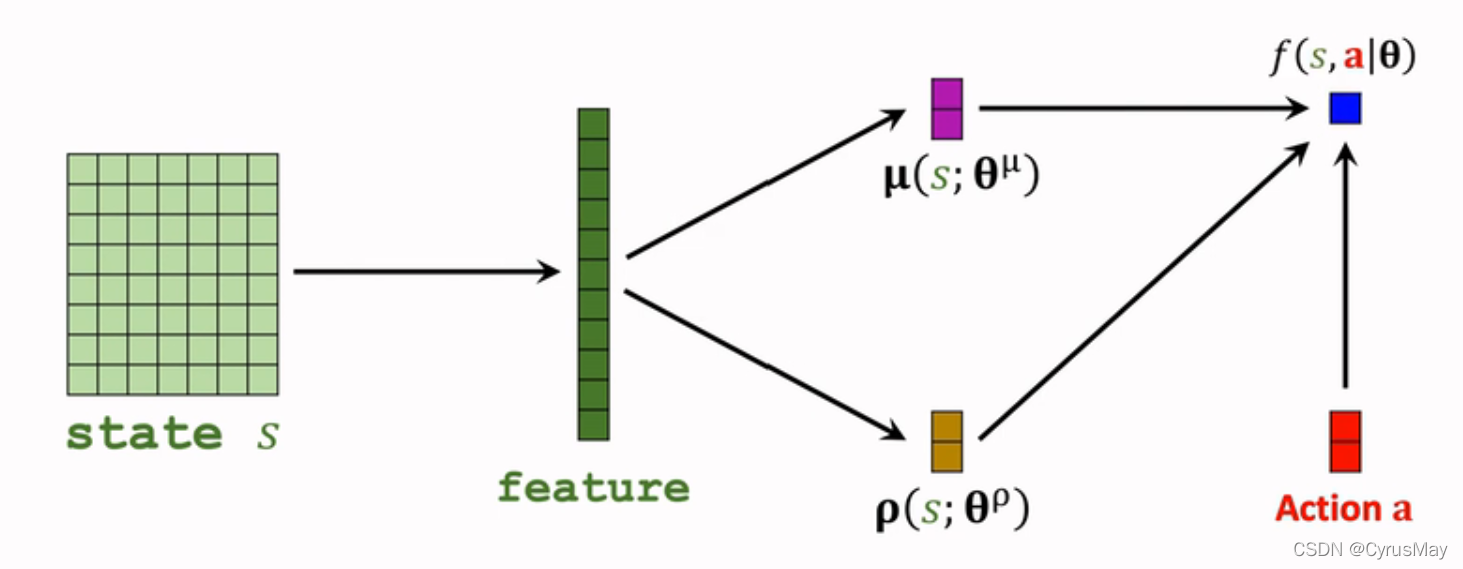
- 策略网络为: π ( a ∣ s ; θ μ , θ ρ ) = Π i = 1 d 1 2 π ⋅ σ i ⋅ e − ( a − μ i ) 2 2 σ i 2 l o g ( π ( a ∣ s ; θ μ , θ ρ ) ) = ∑ i = 1 d [ − l o g ( σ i ) − ( a − μ i ) 2 2 σ i 2 ] + c o n s t l o g ( π ( a ∣ s ; θ μ , θ ρ ) ) = ∑ i = 1 d [ − ρ i 2 − ( a − μ i ) 2 2 ⋅ e ρ i ] + c o n s t log ( π ( a ∣ s ; θ μ , θ ρ ) ) = f ( s , a ; θ ) θ = ( θ μ , θ ρ ) pi(a|s;theta^mu,theta^rho)=Pi_{i=1}^dfrac{1}{sqrt{2pi}cdotsigma_i}cdot e^{-frac{(a-mu_i)^2}{2sigma_i^2}} \ log(pi(a|s;theta^mu,theta^rho))=sum_{i=1}^d[-log(sigma_i)-frac{(a-mu_i)^2}{2sigma_i^2}]+const\log(pi(a|s;theta^mu,theta^rho))=sum_{i=1}^d[-frac{rho_i}{2}-frac{(a-mu_i)^2}{2cdot e^{rho_i}}]+const\log(pi(a|s;theta^mu,theta^rho))=f(s,a;theta)quad theta=(theta^mu,theta^rho) π(a∣s;θμ,θρ)=Πi=1d2π⋅σi1⋅e−2σi2(a−μi)2log(π(a∣s;θμ,θρ))=i=1∑d[−log(σi)−2σi2(a−μi)2]+constlog(π(a∣s;θμ,θρ))=i=1∑d[−2ρi−2⋅eρi(a−μi)2]+constlog(π(a∣s;θμ,θρ))=f(s,a;θ)θ=(θμ,θρ)
- 定义上述的 f ( s , a ; θ ) f(s,a;theta) f(s,a;θ)为辅助神经网络,则得到三个神经网络: μ ( s ; θ μ ) 正 态 分 布 的 均 值 ρ ( s ; θ ρ ) 正 态 分 布 的 对 数 方 差 f ( s , a ; θ ) 辅 助 神 经 网 络 用 于 训 练 策 略 神 经 网 络 mu(s;theta^mu)quad 正态分布的均值\rho(s;theta^rho)quad正态分布的对数方差\f(s,a;theta)quad 辅助神经网络用于训练策略神经网络 μ(s;θμ)正态分布的均值ρ(s;θρ)正态分布的对数方差f(s,a;θ)辅助神经网络用于训练策略神经网络
- 随机策略梯度为: g ( a ) = ∂ l o g ( π ( a ∣ s ; θ ) ) ∂ θ ⋅ Q π ( s , a ) f ( s , a ; θ ) = l o g ( π ( a ∣ s ; θ ) ) + c o n s t g ( a ) = ∂ f ( s , a ; θ ) ∂ θ ⋅ Q π ( s , a ) g(a )= frac{partial log(pi(a|s;theta))}{partial theta}cdot Q_pi(s,a)\ f(s,a;theta)=log(pi(a|s;theta))+const\g(a )=frac{partial f(s,a;theta)}{partial theta}cdot Q_pi(s,a) g(a)=∂θ∂log(π(a∣s;θ))⋅Qπ(s,a)f(s,a;θ)=log(π(a∣s;θ))+constg(a)=∂θ∂f(s,a;θ)⋅Qπ(s,a)
3.2.6 状态价值函数的近似
- 使用reinforce算法: u t = r t + γ ⋅ r t + 1 + . . . θ ← θ + β ⋅ ∂ f ( s , a ; θ ) ∂ θ ⋅ u t u_t = r_t+gammacdot r_{t+1}+...\thetagetstheta+betacdotfrac{partial f(s,a;theta)}{partial theta}cdot u_t ut=rt+γ⋅rt+1+...θ←θ+β⋅∂θ∂f(s,a;θ)⋅ut
- 使用 A-C算法: Q π ∼ q ( s , a ; W ) θ ← θ + β ⋅ ∂ f ( s , a ; θ ) ∂ θ ⋅ q ( s , a ; W ) Q_pisim q(s,a;W)\thetagetstheta+betacdotfrac{partial f(s,a;theta)}{partial theta}cdot q(s,a;W) Qπ∼q(s,a;W)θ←θ+β⋅∂θ∂f(s,a;θ)⋅q(s,a;W)
4 总结
- 连续动作空间有无穷多种动作数量
- 解决方案包括:
- 离散动作空间,使用标准DQN或者策略网络进行学习,但是容易引起维度灾难
- 使用确定策略网络进行学习(但没有随机性)
- 随即策略网络( μ 与 σ 2 mu与sigma^2 μ与σ2)
- 训练过程的技巧:
- 构造辅助神经网络 f ( s , a ; θ ) f(s,a;theta) f(s,a;θ)计算策略梯度
- 策略梯度近似算法包括:reinforce、Actor-Critic算法
- 可以改进reinforce算法,使用带有baseline的reinforce算法
- 可以改进Actor-Critic算法,使用A2C算法
本文内容为参考B站学习视频书写的笔记!
时间是贼
偷走一切
————五月天(如烟)————
by CyrusMay 2022 04 13