江苏大学 操作系统 期末/考研复试大题复习
写在前面的话
基于:詹永照, 薛安荣. 操作系统设计原理[M]. 第二版. 科学出版社, 2021.
部分内容可能与王道考研等参考资料有所区别(如内存管理的clock算法与标志位、磁盘调度的scan算法),请注意区分与取舍。
同步与互斥
假定一个阅览室最多可以容纳100人阅读,读者进入和离开阅览室时,都必须在阅览室门口的一个登记表上注册或注销。假定每次只允许一个人注册或注销,设阅览室内有100个座位。
(1)试问:应编制几个程序和设置几个进程?程序和进程的对应关系如何?
(2)试用PV操作编写读者进程同步算法
答案:
(1)应编制一个读者程序,有N个读者应设置N个读者进程。程序和进程对应关系1:N,读者程序为N个读者进程共享。
(2)
semaphore full,mutex;
PID seat[100];
int i;
full.value=100;
mutex.value=1;
for(int i=0;i<100;i++)
seat[i]=-1;
process reader(PID procid){
int i;
P(&full);
P(&mutex);
i=0;
while(seat[i]!=-1)
i++;
seat[i]=procid;
V(&mutex);
read at seat i;
P(&mutex);
seat[i]=-1;
V(&mutex);
V(&full);
}
死锁
银行家算法中,若出现以下资源分配情况,试问:
(1)系统是否安全?如果安全,请给出一个安全执行序列,如果不安全,说明理由。
(2)如果进程依次有如下资源请求,系统将怎样进行资源分配?说明理由
P
1
P_1
P1(1,0,2);
P
4
P_4
P4:(3,3,0);
P
0
P_0
P0:(0,2,0)
| 进程 | 最大资源需求量 | 已分配资源量 | 剩余资源量 |
|---|---|---|---|
| R 1 R_1 R1 R 2 R_2 R2 R 3 R_3 R3 | R 1 R_1 R1 R 2 R_2 R2 R 3 R_3 R3 | R 1 R_1 R1 R 2 R_2 R2 R 3 R_3 R3 | |
| P 0 P_0 P0 | 7 5 3 | 0 1 0 | 3 3 2 |
| P 1 P_1 P1 | 3 2 2 | 2 0 0 | |
| P 2 P_2 P2 | 9 0 2 | 3 0 2 | |
| P 3 P_3 P3 | 2 2 2 | 2 1 1 | |
| P 4 P_4 P4 | 4 3 3 | 0 0 2 |
答案:
安全的。(1)先计算各个进程还需要的资源:
P
0
P_0
P0:(7 4 3),
P
1
P_1
P1:(1 2 2),
P
2
P_2
P2: (6 0 0),
P
3
P_3
P3:(0 1 1),
P
4
P_4
P4: (4 3 1);
系统剩余资源量为(3 3 2),满足
P
1
P_1
P1或
P
3
P_3
P3 进程对资源的最大需求,可将资源分配给
P
1
P_1
P1或
P
3
P_3
P3进程,例如先分配给
P
1
P_1
P1,
P
1
P_1
P1和
P
3
P_3
P3进程。执行完毕后归还所占资源,此时系统有可用资源数为(7 4 3),此时系统可用资源数可满足任何一个进程的最大需求。故系统是安全的。
可执行的序列为
P
1
P
3
P
0
P
2
P
4
P_1P_3P_0P_2P_4
P1P3P0P2P4或
P
3
P
1
P
0
P
2
P
4
P_3P_1P_0P_2P_4
P3P1P0P2P4等。
(2) 系统按
P
1
P_1
P1,
P
3
P_3
P3,
P
0
P_0
P0,
P
2
P_2
P2,
P
4
P_4
P4顺序执行,每个进程均能执行完。故
P
1
P_1
P1的需求可以满足。
P
4
P_4
P4请求(3,3,0):剩余资源:(2,3,0)。系统剩余资源不能满足
P
4
P_4
P4的要求,不能分配。
P
0
P_0
P0请求(0,2,0):剩余资源:(2,3,0),假设分配后,还剩余系统资源:(2,1,0)。
P
0
P_0
P0~
P
4
P_4
P4尚需的资源数均不能得到满足(或者说,虽然满足进程
P
0
P_0
P0的当前请求但不满足进程对资源的最大需求),故不能对
P
0
P_0
P0分配。
内存管理
设某计算机的逻辑地址空间和物理地址空间均为64KB,按字节编址。若某进程最多需要8页数据存储空间,页的大小为4KB。操作系统采用固定分配局部置换策略为此进程分配4个页框,如下表在10:23时已经有4页进入内存,下表的装入时间和访问时间为一天内24小时时间。访问位的0表示未被访问,1表示已被访问。修改位的0表示未被修改,1表示已被修改。表中的访问时间均为对应的页最近一次被访问的时间。
| 页号 | 页框号 | 装入时刻 | 访问时刻 | 访问位 | 修改位 |
|---|---|---|---|---|---|
| 0 | 7 | 10:13 | 10:30 | 1 | 1 |
| 1 | 5 | 10:23 | 10:26 | 1 | 1 |
| 2 | 2 | 10:20 | 10:40 | 1 | 1 |
| 3 | 9 | 10:16 | 10:50 | 1 | 0 |
当进程执行到10:55时,要访问逻辑地址为6CDFH的数据,请回答下列问题:
(1)该逻辑地址对应的页号是多少?
(2)若采用先进先出(FIFO)置换算法,该逻辑地址对应的物理地址是多少?
(3)若采用最近最少用(LRU)置换算法,该逻辑地址对应的物理地址是多少?
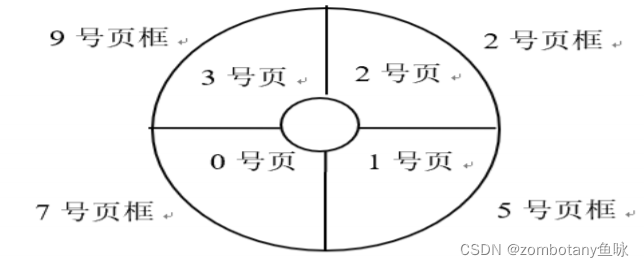
(4)若采用时钟(CLOCK)置换算法,该逻辑地址对应的物理地址是多少?设搜索下一页的指针沿顺时针方向移动,且当前指向2号页框。示意图如下。
答案:
根据页式管理的工作原理,应先考虑页面大小,以便将页号和页内位移分解出来。页面大小为4KB,即
2
12
2^{12}
212,则得到页内位移占虚拟地址的低12位,页号占剩余高位。由于每位十六进制数占4bit,故十六进制数的低3位数为页内偏移量。
(1)页大小为4K,所以页内偏移地址为12位,于是前4位是页号,所以6CDFH的逻辑页号为:6
(2)FIFO,则被置换的页面所在页框为7,所以对应的物理地址为7CDFH
(3)LRU,则被置换的页面所在页框为5,所以对应的物理地址为5CDFH
(4)CLOCK,则被置换的页面所在页框为9,所以对应的物理地址为9CDFH
文件
一个*nix文件系统使用4KB磁盘块和4字节磁盘地址。如果每个i结点中有10个直接表项以及一个一次间接块、一个二次间接块和一个三次间接块,那么
(1)文件最大为多大?
(2)如果有且只有i结点已经在内存中,访问第12345字节需要读多少次磁盘?
(3)如果有且只有i结点已经在内存中,访问第1234567890字节需要读多少次磁盘?
答案:
(1)
4
K
/
4
=
1
K
4K/4=1K
4K/4=1K
10
∗
4
K
+
1
K
∗
4
K
+
1
K
∗
1
K
∗
4
K
+
1
K
∗
1
K
∗
1
K
∗
4
K
=
4
T
4
G
4
M
40
K
B
10*4K+1K*4K+1K*1K*4K+1K*1K*1K*4K=4T4G4M40KB
10∗4K+1K∗4K+1K∗1K∗4K+1K∗1K∗1K∗4K=4T4G4M40KB
(2)因为12345<40K,故该地址落入直接索引中,由于i-node已在内存,因此只需要1次访问磁盘块,即一次访问含有该位置数据的磁盘块。
(3)因为
4
M
40
K
<
1234567890
<
4
G
4
M
40
K
4M40K<1234567890<4G4M40K
4M40K<1234567890<4G4M40K,故该地址落入二级间接索引中,由于i-node已在内存,因此只需访问3次磁盘块。
磁盘
设某磁盘旋转速度为每分钟6000转。每个磁道有100个扇区,相邻磁道间的平均移动时间为1ms。若在某时刻,磁头位于100号磁道处,并沿着磁道号增大的方向服务,磁道号请求队列为50、200、80、110、180,对请求队列中的每个磁道需读取1个随机分布的扇区,则:
(1)在SSTF(最短寻道)调度情况下,读完这5个扇区总共需要多少时间,要求给出计算过程;
(2)在SCAN(扫描)调度情况下,读完这5个扇区总共需要多少时间,要求给出计算过程;
(3)就以上二种算法进行对比分析,并为用户选择提供建议说明。
答案:
由于转速为
6000
r
/
m
6000r/m
6000r/m,则平均旋转延迟为
60
∗
1000
/
(
6000
∗
2
)
=
5
m
s
60*1000/(6000*2)=5ms
60∗1000/(6000∗2)=5ms,总的旋转延迟时间为
5
∗
5
m
s
=
25
m
s
5*5ms=25ms
5∗5ms=25ms。由于旋转一周的时间为
10
m
s
10ms
10ms,每个磁道有100个扇区,读取一个磁道上一个扇区的平均读取时间为
10
m
s
/
100
=
0.1
m
s
10ms/100=0.1ms
10ms/100=0.1ms,总的读取扇区的时间=
0.1
m
s
∗
5
=
0.5
m
s
0.1ms*5=0.5ms
0.1ms∗5=0.5ms。
1)SSTF:执行顺序是100->110->80->50->180->200。则移到磁道长度为10+60+150=220。故读取上述磁道上所有扇区所花的总时间=220ms+25ms+0.5ms=245.5ms
2)采用SCAN调度算法访问磁道的顺序为100->110->180->200->80->50,则移到磁道长度为
100
+
150
=
250
100+150=250
100+150=250。故读取上述磁道上所有扇区所花的总时间=
250
m
s
+
25
m
s
+
0.5
m
s
=
275.5
m
s
250ms+25ms+0.5ms=275.5ms
250ms+25ms+0.5ms=275.5ms。
两者算法都有寻道时间短、寻道优化的优势,而且两种寻道时间相差
30
m
s
30ms
30ms,但相比较而言,SSTF可能会频繁切换服务方向,而SCAN不会。由于磁臂调度是机械运动,存在惯性,频繁切换服务方向会降低机械装置的使用寿命,故实际应用中SCAN优于SSTF。