【FMCW雷达系统中使用复基带架构优缺点分析】
文章编辑: 调皮哥的小助理
本文来源:Using a complex-baseband architecture in FMCW radar systems.pdf
官方网址:https://www.ti.com.cn/
为什么FMCW毫米波雷达系统中要使用复基带架构?
【摘要】
文解释了“复基带架构”在调频连续波 (FMCW) 雷达系统中的优势, 传统的雷达前端使用带有实基带和模数转换器 (ADC) 链路的实混频器实现。 然而,在 FMCW 雷达环境中使用正交混频器和复基带架构可以发挥雷达性能的优势。
该架构已在德州仪器 (TI) 的 76–81 GHz 完全集成了互补金属氧化物半导体 (CMOS) 毫米波 (mmWave) 传感器中实施。 本白皮书的第一部分描述了 FMCW 雷达背景下的复基带架构以及该架构的优势, 第二部分解释了复基带如何不会增加数字信号处理 (DSP) 端的内存需求以及计算的负担。
1.概述
从历史上看,雷达的实现需要使用(功率放大器 [PA]、低噪声放大器 [LNA]、压控振荡器 [VCO]、模数转换器 [ADC])等分立元件,但现在可以使用更多集成的解决方案。
基于互补金属氧化物半导体 (CMOS) 的雷达将所有射频 (RF) 、模拟功能以及数字信号处理 (DSP) 功能集成到单个芯片中,实现了最终的雷达片上系统解决方案。这种高度集成的传感器明显简化了雷达传感器的实现,使得雷达传感器具有紧凑的外形尺寸,并节约了成本。
德州仪器 (TI) 为快速增长的汽车和工业雷达市场提供了一系列高度集成的 76–81-GHz 雷达设备。本白皮书重点介绍德州仪器 (TI) 76–81-GHz 雷达设备的一个特定方面:使用正交混频器和复基带架构,而不是传统的实混频器和实基带架构。
2.FMCW雷达的概念
让我们回顾一下 FMCW 雷达背后的工作原理。 在 FMCW 雷达解决方案中,发射信号是线性调频连续波 (L-FMCW) chirp信号,其频率与时间特性遵循图 1 所示的锯齿模型, 线性 FMCW 发射调频信号的频率 fT(t) 和相位 FT(t) 分别表示为时间的线性和二次函数,如图 1 所示。
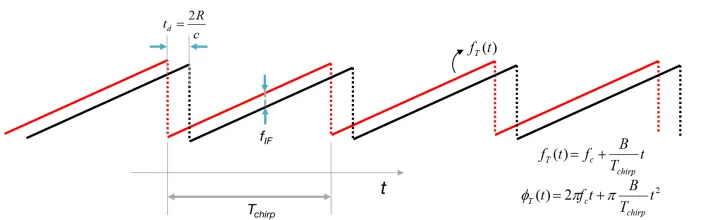
(图1 FMCW锯齿信号模式)
在传统的 FMCW 雷达实施中(如图 2),本地振荡器 (LO) 模块生成线性调频连续波信号 cos(FT(t)),该信号由 PA 放大并从天线发射出去。
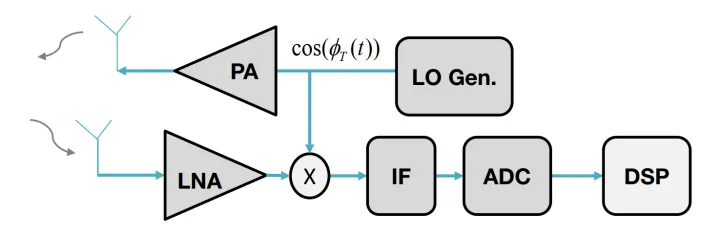
(图2 FMCW雷达顶层框图)
雷达照射的“感兴趣区域”中存在的任何目标都会反射回发射的信号,同时接收天线接收到反射信号,LNA 将其放大,接收到的信号与 LO 信号混合以产生拍频(中频 [IF])输出,ADC 将其数字化并随后由 DSP 处理。
在图3中描绘了接收到的 FMCW 信号的特点,它包括与各种目标相对应的发射信号不同延迟和衰减的副本(回波信号是发射信号的时间延迟副本)。 可以看到,每个物体对应的差拍信号是一个单频信号(忽略调频开始和结束处的边缘时间效应),其频率 fb 与物体和雷达间的距离 R 成正比。 因此,检测目标及其与雷达之间的距离的过程包括对差拍信号做快速傅里叶变换(FFT),并从噪声层中识别出FFT后的峰值。
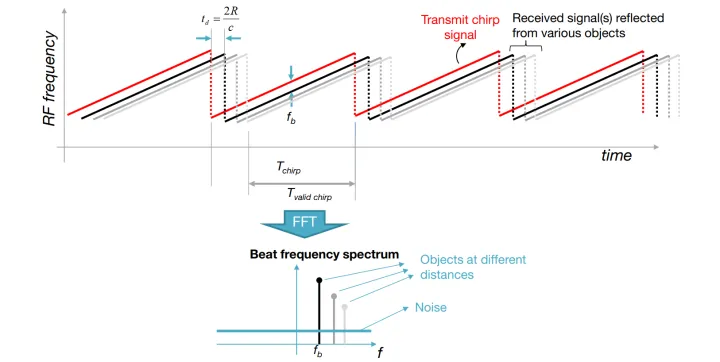
(图3 接收FMCW雷达信号和拍频频谱)
事实上,对FMCW雷达目标除了上述这个非常简单的解释之外,我们还有忽略了很多的细节,特别是考虑到移动物体时。
对于运动物体,拍频信号(差拍信号)有一个多普勒分量,该分量取决于雷达和目标之间的相对速度。你可以通过在调频chirp脉冲之间进行第二次FFT估计多普勒分量(也就是相对速度),并观察拍频信号从一个chirp脉冲到另一个chirp脉冲的相移。
总而言之,目标检测的过程包括对接收到的每个chirp脉冲对应的ADC采样点做一维FFT,然后对一维FFT结果的多个chirp脉冲进行二维FFT,二维FFT执行的结果是得到距离-速度图谱,目标检测过程发生在二维FFToutput上,具体涉及到在噪声电平或周围杂波中检测目标的峰值。
在大多数实现中,还有一个“基于多天线波束成形的角度估计”过程,但暂时不会在本文中详细介绍这些细节。
3.使用实基带架构实现FMCW雷达
如今的大多数雷达都使用实混频器和实(仅 I)基带和 ADC 链实现, 采用这种实现方式的部分原因是:在基于离散解决方案的雷达实现中,无需将ADC和可变增益放大器(VGAs)的数量增加一倍,从而获得成本的优势。
图 4 显示了发射 (LO)、接收 (RX) 和拍频 (IF) 信号的瞬时频谱。 图 4a 显示了 LO 信号 cos(FT(t)) 频谱,表示斜坡 LO 的瞬时频率。
图 4b 中的 RX 信号频谱包含代表不同目标的 LO 信号的延迟和衰减版本,感兴趣的信号包含在 RX 信号频谱的“带内”部分,而频谱的“镜像频带”部分没有任何感兴趣的信号, 这是因为接收到的信号是发射的 LO 信号“延迟”, 因此,不同的目标对应的拍频总是落在复基带频谱的一侧,图中显示为蓝色水平条的热本底噪声分布在带内和镜像频带带上。
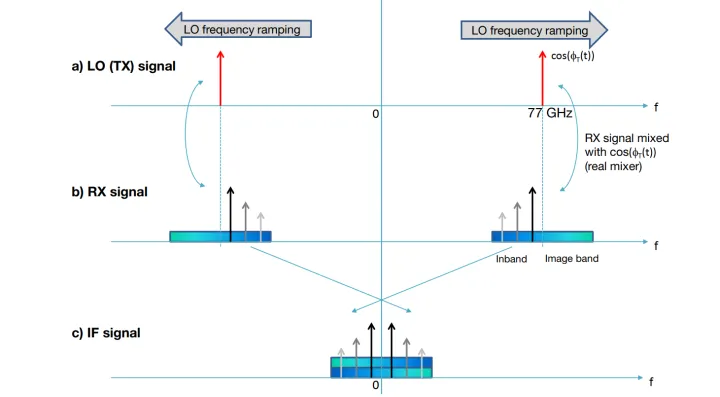
(图4 一个实数混频器和实基带遭受镜像频带噪声折叠。(a)显示斜坡的LO (TX)信号的瞬时频谱(b)不同物体反射后的RX信号,©实数混频器后的中频信号。)
如图 4c 所示,当使用实混频器和实基带链时,混频器后的 IF 信号频谱会受到镜像带噪声折返的影响。 换言之,IF 信号会经历由带内和镜像频带的噪声引起的信噪比 (SNR) 损失。 正如您将看到的,这会导致高达 3 dB 的性能损失,这些不利影响可以通过的复基带链来避免。
4.复基带架构的实现
图 5 中的框图显示了正交混频器和复基带架构的使用。 在这种情况下,接收到的信号与 LO 的 cos() 和 sin() 函数相乘,得到具有用于同相 (I) 和正交 (Q) 通道的重复 IF 链和 ADC。
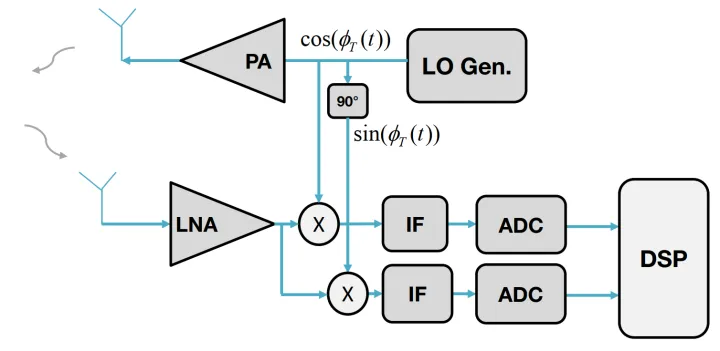
(图5 复基带结构)
图 6 显示了正交混频器和复基带实现中各种信号的频谱。 由于 RX 信号在正交混频器中与 cos(FT(t)) + jsin(FT(t)) 相乘(相当于频谱搬移),因此带内和镜像频带保持分离,并且不会因镜像频带噪声折返而增加噪声。 因此,这种架构可能具有整体噪声系数优势,下面我们讨论 FMCW 雷达中复基带架构的一些关键优势。
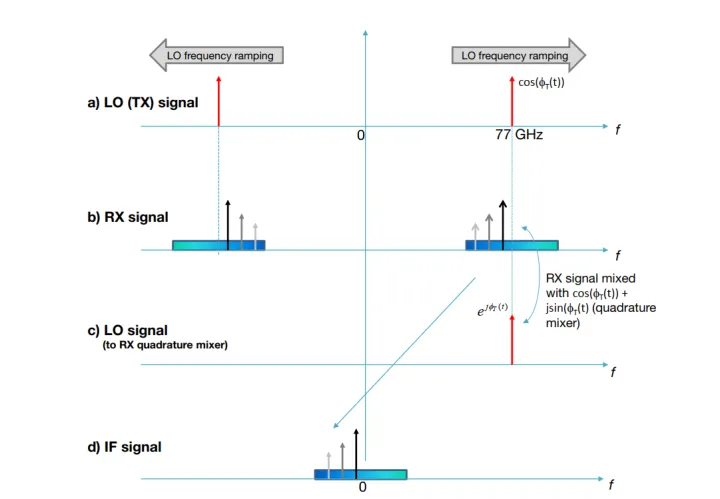
(图6 正交混频器和无镜像频带噪声折叠的复基带。(a)显示LO (TX)信号的瞬时频谱(b)各种物体反射后的RX信号,©正交LO信号,(d)正交混频器后的中频信号。)
5.复基带架构的优势
5.1 改善噪声图
复基带架构最直接的好处是可以通过消除镜像频带噪声折返来提高噪声系数,与仅代表实信号实现的单边带 (SSB) 噪声系数相比,这里的有效噪声系数对应于改进的双边带 (DSB) 噪声系数。
理论上,噪声系数可提高多达 3dB。在实际中,噪声系数的改进会稍微小一些,且是特定于实现的,因为在 LNA 之后将接收到的信号分成 I 和 Q 路径会产生信号功率损耗,并且由此产生的 IF 噪声对整体噪声的贡献更大。 不过,在复基带实现中具备有效的噪声系数的改进。
当考虑到雷达系统由TX噪声(振幅噪声或不相关相位噪声)主导时,复基带的这种改进尤其重要。在这些系统中,来自天线耦合或缓冲器的反射的噪声主导着RX热噪声电平。在这种情况下,复合基带架构实现了 3dB的噪声值增益。
为什么噪声系数会得到3dB的改善呢?下面我们来证明一下这个结论:
在雷达的接收端,射频调制信号可经过模拟IQ解调器解调,经过低通滤波器之后分别得到模拟 I 和 Q 信号。数学推导如下:
i
(
t
)
⋅
cos
(
ω
c
t
)
↔
1
2
π
⋅
I
(
ω
)
∗
{
π
⋅
[
δ
(
ω
+
ω
c
)
+
δ
(
ω
−
ω
c
)
]
}
=
1
2
i(t) cdot cos left(omega_c tright) leftrightarrow frac{1}{2 pi} cdot I(omega) *left{pi cdotleft[deltaleft(omega+omega_cright)+deltaleft(omega-omega_cright)right]right}=frac{1}{2}
i(t)⋅cos(ωct)↔2π1⋅I(ω)∗{π⋅[δ(ω+ωc)+δ(ω−ωc)]}=21
⋅
[
I
(
ω
+
ω
c
)
+
I
(
ω
−
ω
c
)
]
cdotleft[Ileft(omega+omega_cright)+Ileft(omega-omega_cright)right]
⋅[I(ω+ωc)+I(ω−ωc)]
q
(
t
)
⋅
sin
(
ω
c
t
)
↔
1
2
π
⋅
Q
(
ω
)
∗
{
j
π
⋅
[
δ
(
ω
+
ω
c
)
−
δ
(
ω
−
ω
c
)
]
}
=
1
2
j
q(t) cdot sin left(omega_c tright) leftrightarrow frac{1}{2 pi} cdot Q(omega) *left{j pi cdotleft[deltaleft(omega+omega_cright)-deltaleft(omega-omega_cright)right]right}=frac{1}{2} j
q(t)⋅sin(ωct)↔2π1⋅Q(ω)∗{jπ⋅[δ(ω+ωc)−δ(ω−ωc)]}=21j
⋅
[
Q
(
ω
+
ω
c
)
−
Q
(
ω
−
ω
c
)
]
cdotleft[Qleft(omega+omega_cright)-Qleft(omega-omega_cright)right]
⋅[Q(ω+ωc)−Q(ω−ωc)]
其中,虚数的存在表明,两部分信号之间的载波存在90°相差,二者保持正交。
下图给出了IQ解调器的整个图解过程。
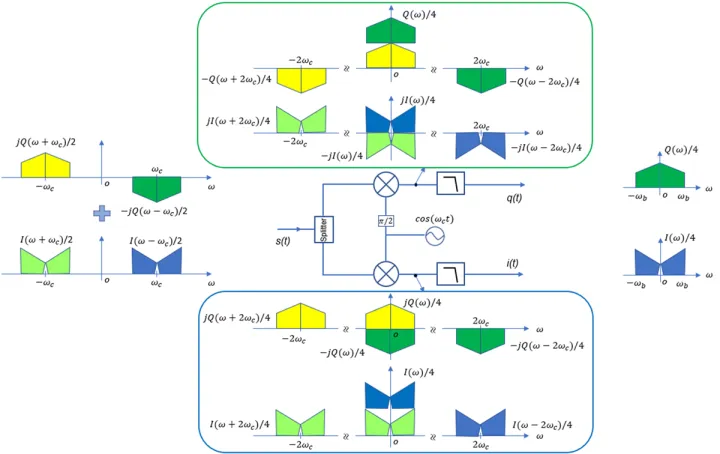
(IQ解调频谱变换示意图 。图片来源:https://www.mwrf.net/tech/tm/2020/26708.html)
通过上图的中间部分可以明显看到,IQ解调的过程中,在频谱搬移时出现了正负频谱叠加的情况,因此其功率增加倍,信噪改善3dB(约为一半)。
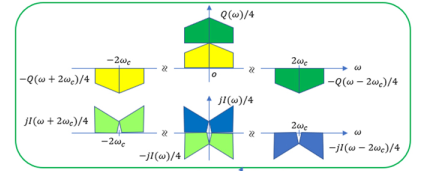
(Q路叠加)
5.2 提高抗干扰能力
在FMCW雷达中,镜像频带只包含噪声,没有任何所需信号。因此,通过复基带实现,您可以监控镜像频带频谱,以检测干扰和/或准确估计热噪声水平,而不会产生杂波。
例如,您可以轻松识别镜像频带中的频率或能量尖峰是否来自干扰雷达设备,而不会对其是否可能是真正感兴趣的目标产生任何歧义。换句话说,检测并减轻干扰雷达的干扰,而不会对真正的目标产生任何的模糊性。
此外,由于复基带架构可防止镜像频带折返,因此它对镜像频带中存在的任何干扰具有更高的鲁棒性。 在实基带架构中,任何存在于或扫过镜像频带的干扰也会在频带内折回,从而使得雷达更容易受到性能损失的影响。
5.3 用于射频延迟补偿的数字频率/相移
在支持多个 RX 链(用于 RX 波束成形)的典型雷达实现中,所有 RX 链的天线延迟以及 RF 电路延迟必须匹配,以保证正确的波束成形功能,这对电路板布线以及跨通道的射频组件匹配造成了限制。
在这种情况下,从图 3 可以看出,在 FMCW 雷达信号中,“延迟”相当于“频移”。 如图所示,拍频 fb 与往返延迟 td 成正比。 基于这一观察,可以通过使用数字频率/相移来补偿雷达系统中的各种延迟。
在复基带架构中,通过对对应于每个RX信道的I和Q复数据样本使用不同的数字频率/相位去旋转,甚至在FFT处理之前,可以使用复基带输出较好地对信道间的任何延迟失配和/或RF相位响应失配进行数字补偿。
5.4 降低RF互调相乘信号的影响
众所周知,当 f1 和 f2 输入频率有两个频段时,RF 的非线性(例如三次非线性)会导致在 (2f1–f2) 和 (2f2– f1 ) 处产生“互调相乘信号”。
调皮哥笔记:在大多数情况下,天线设计时必须做到RF输出远离RF输入。这原则也适用于放大器、缓冲器和滤波器。在最坏的情况下,如果放大器和缓冲器的输出以适当的相位和振幅反馈到它们的输入端,那么它们就有可能产生自激振荡。它们可能会变得不稳定,并将噪音和互调相乘信号(intermodulation products)添加到RF信号上。
关于互调相乘信号,也叫做交调产物,或者互调产物,具体的细节分析,请各位读者参照下面这篇文章:
在FMCW雷达接收机中存在一个强烈的天线耦合或缓冲反射信号(例如,在功率级P1和频率f1),与所需的强目标(例如,在功率电平P2和频率f2下)可能会导致互调产物,从而产生鬼影目标(虚假目标)。
在大多数情况下,天线耦合或缓冲器反射信号(P1)会很大并且接近直流(f1 接近于零)。 因此,2f1–f2 处的互调产物会相对较大并落在镜像频带中(大约在–f2 处)。 在仅实基带实现中,此互调产物将在带内折返并降低 f2 处实际对象的 SNR。利用复基带明显缓解了这个问题,因为在镜像频带复基带架构不会引起噪声折返。
5.5 功能安全监控的冗余
双路(I 和 Q)IF 和 ADC 通道的可用性间接提供了一种冗余形式,有助于功能安全监控。 同样,在一个功能齐全的系统中,图像带没有任何所需的信号。 因此,您可以观察与带内能量相关的镜像带能量,以检测 I 或 Q 通道中的故障,从而改进 IF 和 ADC 部分的功能安全监控。
5.6 提高缓冲器的特征和改善附近物体的检测
复基带架构能够准确估计缓冲器的反射以及附近目标的幅度和相位。 具体来说,鉴于缓冲器反射和非常靠近的物体的拍频处于低频(接近 DC),I 和 Q 输出的可用性可以更准确地估计这些信号的频率和相位。 考虑到信号的低频和调频时间可用的短观察窗口,这种估计对于纯实数链路来说要困难得多。 TI 的 76–81-GHz 集成毫米波传感解决方案实现了复杂的基带架构,还包括有助于利用此处概述的优势的数字基带电路。
5.7 DSP的需求
为支持复基带架构而增加IF和ADC链路不会增加DSP的内存负担或处理要求,让我们讨论一下为什么。
考虑复基带的拍频频谱,如图7所示。这幅图展示了图6d中频谱的翻转版本,只是为了方便起见,所以所有目标都出现在正频率一侧,更远的目标出现在更高的频率。在图7中, f b , max f_b, max fb,max 表示对应于最远感兴趣目标的最大拍频。
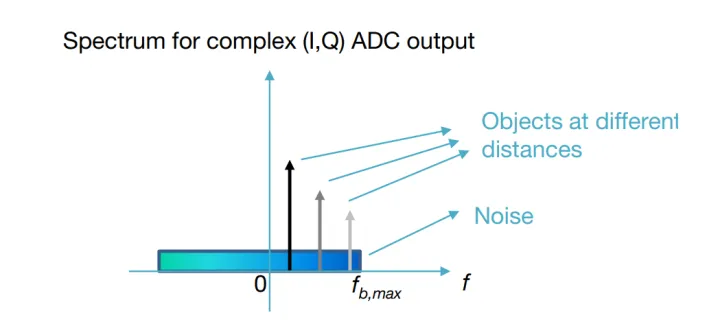
(图7 FMCW雷达的拍频频谱)
在传统的纯实基带实现中,ADC采样需要以2fb的最小(Nyquist)采样率(最大)输出到DSP,参见图8的左侧。图8显示了具有较高噪声系数的纯实数频谱。
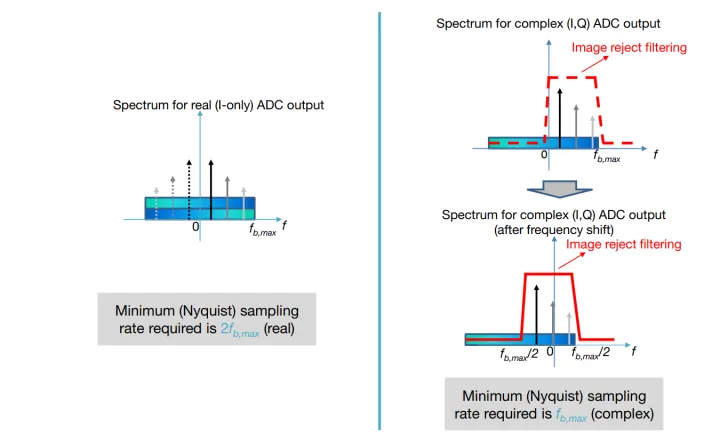
(图8 实基带和复基带输出的拍频频谱)
在图 8 右侧所示的复基带实现中,没有必要将 ADC 输出接口速率加倍。 事实上,可以对频谱进行频移、执行镜像抑制滤波并将抽取的 I 和 Q ADC 样本发送到 fb,max 的 DSP。 因此,进入 DSP 的 ADC 样本的接口速率并没有因为使用复基带而真正增加——2fb,max 处的实际输出变为 fb,max 处的复数输出。 使频谱以直流为中心的频移有助于简化镜像抑制滤波的实施。
TI 的雷达芯片包括一个内置数字移频器,用于对样本进行频移、执行镜像抑制滤波并以降低的接口速率发送复杂的基带输出 (类似于真正的实现)。
另一个优势与在DSP上处理的内存和每秒百万条指令(MIPS)要求有关。纯实数实现需要使用实数样本计算2N点FFT,而complex-baseband(复基带)实现需要使用复数输入样本计算N点FFT,大多数DSP架构都可以以相似的复杂性实现这两种功能。事实上,N点复FFT将比2N点实FFT消耗更低的MIPS,这使得使用complex-baseband输出更有利。同样,对于两个选项,M个调频信号/帧的内存需求是相同的,表1总结了复基带和实基带选项之间的比较
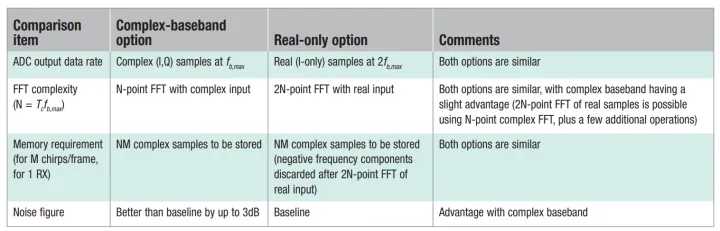
(表1 数据速率、MIPS和内存需求比较)
6. 总结
在 FMCW 雷达系统中使用复基带架构可实现各种性能优势,而不会降低 ADC 接口速率或 DSP 上的内存/MIPS 要求。 在高度集成的 CMOS 雷达解决方案中,这种架构以低成本和低功耗高效实现。 考虑到噪声系数的改善,电流消耗没有明显的损失,因为您可以在更好的噪声系数与操作的开/关占空比之间进行权衡,以有效降低电流消耗。 因此,复基带架构是一项有用的功能,您可以通过 TI 的集成雷达解决方案加以利用。